Backscatter characteristics of snow avalanches for mapping with local resolution weighting
2
2021
... 雪崩活动信息是雪崩定量化研究和灾害科学防灾减灾最为基础的数据.像其他雪崩区一样,藏东南雪崩的各种应对措施也必须建立在可靠的灾害危险性分析和风险评价的基础上[1-5],而详尽的雪崩时空活动信息是雪崩危险性分析和风险评价最重要的基础信息[6].雪崩的位置及规模信息,如发生频次、运动距离、雪崩量、形成区释放雪层厚度等对雪崩风险评价、雪崩区划、雪崩过程模拟、雪崩工程参数的选取及雪崩工程设计都尤为重要.雪崩运动模型的建立及优化高度依赖于可信的雪崩形成区、流通区和堆积区的几何参数[7];而特定气象气候背景和雪体力学性质下的雪崩预测和风险评价模型必须用可信的雪崩活动信息进行检验[8-10].在雪崩工程设计中,工程类型、材质选取、结构设计和应力及强度计算必须以一定的基础数据来支撑,这些数据包括:雪崩运动速度、运动距离、峰值流量、爬高、最大冲击力、雪崩量等[4,11-13],这些数据的历史记录及其发生的概率对雪崩工程的评价也非常重要[14-15]. ...
... 遥感观测方面,根据藏东南地形高差大、降雪量大以及多湿雪雪崩的特点,拟以RS-2U影像为主要监测传感器进行监测,并以哨兵-1号雷达影像、快鸟或高景-1光学影像进行结果的检验和验证.其具体操作步骤按Wesselink等[117]的方法执行.首先是数据前处理,包括各种影像数据的下载、投影坐标系的转换、2×2像素平滑消除斑纹、图像转换成GeoTIFF格式等.第二步,利用掩膜将<5°和>55°的不可能发生雪崩堆积的地形排除;5°和55°这两个阈值的选取符合雪崩的运动规律,McClung等[6,94]将雪崩形成区始发点和雪崩堆积区最远点的连线与水平线的夹角定义为α[94],他发现百年一遇的大雪崩α在15°~50°之间波动,在这个角度之外几乎很少有雪崩活动.根据Johnston等[128]和Delparte等[129]的统计,大多数雪崩的α值介于20°~40°之间.流通区平均坡度介于30°~15°之间,因为雪崩的动能未能全部耗散,冲击力较大,不会有较大粒径的砾石停留,也不会有树龄长的乔木生长.树龄较长的树木一般都出现在堆积区的远端,这些树木因为受到雪崩的冲击产生树木年轮的异常生长或者疤痕,从而成为历史大雪崩定年的证据[130].第三步,利用超宽带测绘带模式(S-1A extra-wide swath mode,S-1A EW)的哨兵-1A影像或者RADARSAT-2的超精细模式(RS-2 ultrafine mode)生成RGB图像.S-1A EW的特点是覆盖范围大、重访期短,其中红色和蓝色通道为无雪崩活动的参考图像,绿色通道为有雪崩图像,在合成图上,绿色一般为雪崩堆积.第四步,雪崩堆积的人工识别,雪崩堆积在雷达影像上一般呈绿色舌状,并向下延伸,在高分辨率的RS-2U图像上很容易辨识,通过对已发生雪崩堆积的判读,可以建立雪崩堆积后向散射的一组阈值,并制作阈值直方图.为了保证阈值的准确,在判读雪崩影像时一般由两名雪崩研究专业人员共同完成.滤波时阈值选取有固定阈值和动态阈值两种方式,Wesselink等[117]采用3 db、Karbou等[131]、Leinss等[91]采用4 db、Vicker等[106]采用6 db的固定值,发现参考影像为湿雪时分类结果不好.在参考影像为干雪时,雪崩暴发前的气象状况也会对雪崩堆积的分类产生影响[132].为了提高分类的准确性,Tompkin等[1]考虑了局地亮度对后向散射的影响,在计算后向散射时进行了局地分辨率权重的多视处理,采用了1.91 db的阈值进行分类,使得召回率和准确率都有了显著的提高.Eckerstorfer等[114]采用动态阈值,即后向散射μ+1.5SD和μ+2.5SD两种阈值,发现高阈值(2.5SD)的K均值聚类的分类效果更好.取值过高,有些雪崩堆积有可能没有被统计在内;取值过低,有些不是雪崩堆积的区域可能被统计进来.第五步,对无雪崩发生的参考图像和有雪崩发生的图像进行5×5像素中值滤波以消除斑纹.第六步,以雪崩活动的后向散射影像减去无雪崩活动的参考影像生成后向散射变化影像.第七步,生成雷达入射角度、顶底倒置以及雷达阴影等不可能发生雪崩的掩膜,以剔除部分地形影响.第八步,对监测影像使用各种掩膜及散射变化阈值,生成雪崩和无雪崩的二元像素分类.第九步,使用去除小斑块RSO滤波器(Remove Small Objects filter),根据影像分辨率,滤除确定雪崩堆积边界的不规则像元.第十步,采用自适应滤波将具有相同性质的像元连接起来,生成雪崩和无雪崩的二元影像图(图6). ...
Snow avalanche detection and source constraints made using a networked array of infrasound sensors
1
2021
... 由于雪崩形成地震波和次声波的机理不同,两者各自都有适合监测的目标[30,35].次声波适合监测粉状雪崩和雪崩运动的开始,而地震波适合观测湿雪崩和雪崩运动的结束[30,36].近年来的研究发现次声波监测比震动监测具有更大的优势,其原因不仅仅在于次声的衰减较慢,还在于次声波观测的反方位角具有更好的连续性[30],可以更好地进行雪崩的定位[2,37]. ...
Automated snow avalanche release area delineation–validation of existing algorithms and proposition of a new object-based approach for large-scale hazard indication mapping
1
2018
... 在当前的雪崩危险性和风险评估中,LiDAR也发挥着重要的作用.每次雪崩发生时雪崩形成区中的释放区通常都不尽相同,危险性分析中释放区通常通过分析高分辨率DEM(一般大于10 m)的坡度、朝向、起伏度和曲率来确定[46,62],LiDAR测量的高分辨率和高精度的雪深资料可以极大地提高雪崩释放区识别和雪崩风险评估的准确性,并被广泛应用到偏远地区的雪崩风险制图中[3,74].冬季积雪能通过填洼改变地形的表面特征,不同的冬季地表特征对随后的雪崩运动特征有显著影响,积雪模型中的干摩擦系数和库伦摩擦系数的选取对模型模拟的结果有很大影响,LiDAR获取的冬季积雪深度对这两种摩擦系数的确定有非常重要的参考价值.当前在获取雪崩释放区DEM时,飞机或无人机搭载的LiDAR传感器已逐渐取代了传统的摄影测量. ...
4
2015
... 雪崩活动信息是雪崩定量化研究和灾害科学防灾减灾最为基础的数据.像其他雪崩区一样,藏东南雪崩的各种应对措施也必须建立在可靠的灾害危险性分析和风险评价的基础上[1-5],而详尽的雪崩时空活动信息是雪崩危险性分析和风险评价最重要的基础信息[6].雪崩的位置及规模信息,如发生频次、运动距离、雪崩量、形成区释放雪层厚度等对雪崩风险评价、雪崩区划、雪崩过程模拟、雪崩工程参数的选取及雪崩工程设计都尤为重要.雪崩运动模型的建立及优化高度依赖于可信的雪崩形成区、流通区和堆积区的几何参数[7];而特定气象气候背景和雪体力学性质下的雪崩预测和风险评价模型必须用可信的雪崩活动信息进行检验[8-10].在雪崩工程设计中,工程类型、材质选取、结构设计和应力及强度计算必须以一定的基础数据来支撑,这些数据包括:雪崩运动速度、运动距离、峰值流量、爬高、最大冲击力、雪崩量等[4,11-13],这些数据的历史记录及其发生的概率对雪崩工程的评价也非常重要[14-15]. ...
... 雪崩遥感监测的结果可以应用于雪崩的危险性分析和风险评价.雪崩的危险性分析包括两个方面:第一个是根据已经观测的雪崩历史记录分析雪崩发生时的各种情景及其发生的概率;其次是根据当前雪崩潜在的成灾因素评估未来雪崩发生的类型和强度(指破坏力:堆积区运动距离、堆积体积和冲击力).前一个是后向计算(backward facing indication),而后一个是前向预测(forward looking indication)[4].灾害的风险评价主要是评估各种雪崩情景下潜在的危害情况,主要与承灾体和暴露状况有关.雪崩发生的历史记录是雪崩危险性分析和风险评价的基础,在雪崩观测资料较少的情况下仍可以制作雪崩危险性图[Hazard (indication) maps],一般比例尺为1∶10 000~1∶50 000[41],主要反映雪崩发生的极端情景下的最大运动距离和雪崩堆积范围,一般不够详细和准确;如果观测时间序列较长则可以制作包含发生频率和强度的雪崩危险度区划图(hazard zone planning maps),一般比例尺为1∶2 000~1∶10 000.雪崩危险度区划是雪崩危险区土地利用、基础设施选线和选址,以及雪崩工程防治的基础和标准. ...
... 欧洲雪崩的规模分级[4,6](采用雪崩工程设计分类系统) ...
... The avalanche size classification scheme used in Europe[4,6] (adopt the standard of avalanche engineering design) ...
Avalanche hazard mitigation in East Karakoram Mountains
1
2021
... 雪崩活动信息是雪崩定量化研究和灾害科学防灾减灾最为基础的数据.像其他雪崩区一样,藏东南雪崩的各种应对措施也必须建立在可靠的灾害危险性分析和风险评价的基础上[1-5],而详尽的雪崩时空活动信息是雪崩危险性分析和风险评价最重要的基础信息[6].雪崩的位置及规模信息,如发生频次、运动距离、雪崩量、形成区释放雪层厚度等对雪崩风险评价、雪崩区划、雪崩过程模拟、雪崩工程参数的选取及雪崩工程设计都尤为重要.雪崩运动模型的建立及优化高度依赖于可信的雪崩形成区、流通区和堆积区的几何参数[7];而特定气象气候背景和雪体力学性质下的雪崩预测和风险评价模型必须用可信的雪崩活动信息进行检验[8-10].在雪崩工程设计中,工程类型、材质选取、结构设计和应力及强度计算必须以一定的基础数据来支撑,这些数据包括:雪崩运动速度、运动距离、峰值流量、爬高、最大冲击力、雪崩量等[4,11-13],这些数据的历史记录及其发生的概率对雪崩工程的评价也非常重要[14-15]. ...
8
2006
... 雪崩活动信息是雪崩定量化研究和灾害科学防灾减灾最为基础的数据.像其他雪崩区一样,藏东南雪崩的各种应对措施也必须建立在可靠的灾害危险性分析和风险评价的基础上[1-5],而详尽的雪崩时空活动信息是雪崩危险性分析和风险评价最重要的基础信息[6].雪崩的位置及规模信息,如发生频次、运动距离、雪崩量、形成区释放雪层厚度等对雪崩风险评价、雪崩区划、雪崩过程模拟、雪崩工程参数的选取及雪崩工程设计都尤为重要.雪崩运动模型的建立及优化高度依赖于可信的雪崩形成区、流通区和堆积区的几何参数[7];而特定气象气候背景和雪体力学性质下的雪崩预测和风险评价模型必须用可信的雪崩活动信息进行检验[8-10].在雪崩工程设计中,工程类型、材质选取、结构设计和应力及强度计算必须以一定的基础数据来支撑,这些数据包括:雪崩运动速度、运动距离、峰值流量、爬高、最大冲击力、雪崩量等[4,11-13],这些数据的历史记录及其发生的概率对雪崩工程的评价也非常重要[14-15]. ...
... 积雪深度是雪体观测中最重要的积雪参数之一,积雪深度的增加不但直接增加雪体沿坡面向下的分力,还可以影响各雪层的密度、硬度以及各雪层的胶结程度进而影响雪崩的暴发及成灾状况[60-61],在实际雪崩研究中积雪深度是经常应用的积雪参数,如早期的研究中,积雪深度阈值被当作预测新雪和雪檐雪崩暴发的指标[6].Veitinger等[62]的研究发现,雪崩形成区的积雪释放面积及雪崩规模与堆积区的积雪深度密切相关.Bocchiola等[63]利用72小时积雪深度一种指标在瑞士阿尔卑斯山区进行了雪崩风险制图.因此,积雪深度监测是积雪和雪崩监测最重要的内容之一. ...
... 积雪物理性质变化对雪崩预报的重要性要高于气象因子[6].但绝大多数的雪崩形成区往往不可到达,雪体力学性质往往不能实地观测获取,而无人机平台搭载的SAR可以填补这方面的空白.但到目前为止,无人机搭载SAR进行雪崩监测的研究还很少,快速获取雷达信息的算法也不成熟,雷达发送和接收天线的研究仍然是主要的技术难题[100].另外,无人机搭载SAR进行雪崩监测必须由技术熟练的专业人员来完成. ...
... 欧洲雪崩的规模分级[4,6](采用雪崩工程设计分类系统) ...
... The avalanche size classification scheme used in Europe[4,6] (adopt the standard of avalanche engineering design) ...
... 掩膜技术是自动监测中最常用的工具,比如坡度掩膜可以大大减少自动监测的工作量.根据McClung等[6]的研究,雪崩堆积区的坡度一般在15°以下,一般认为大于35°的地形就不会产生雪崩堆积[16].地形及障碍物对不同雪崩制动作用不同,粉状雪崩的雪崩云主要的阻力来自空气,密实流层的阻滞主要受地表摩擦和地形的影响,如雪崩沟槽出现转弯,密实流受离心力作用常常会出现弯道超高从而堆积在沟槽的外围.统计显示,在相同的坡度和雪崩量的前提下,沟槽雪崩比坡面雪崩运动速度更快、距离也更远.湿雪雪崩由于雪崩流含水量高,更多地呈现出流体的性质向低处填洼,运动速度慢,但运动距离远.对面的山坡和森林都可以对雪崩产生制动作用,其中森林对雪崩的制动与树木的间距和高度有关,当雪崩规模较大时,雪崩可能会跃过或摧毁森林继续前进.利用ArcGIS软件,采用掩膜的方法可以对坡度大于40°、密林以及开阔水体进行剔除[104].在光学遥感的雪崩堆积监测中,一般采用雪崩堆积与周围环境的亮度、纹理等物理特征对遥感影像进行分类. ...
... 当前雪崩的遥感监测研究主要集中在雪崩的堆积区,因为雪崩形成区和流通区难以到达,遥感监测研究工作开展不多.雪崩形成区(释放区)积雪的各种性质和几何参数及其变化可以通过遥感手段进行监测[118-119],这些参数包括:积雪密度、深度、粒径和含水量等.这些参数是雪崩的第二类预测因子,其重要性要高于气象气候因子[6].如果能获取高分辨率的近实时参数,对于雪崩的预测预警无疑具有非常重要的意义[120]. ...
... 遥感观测方面,根据藏东南地形高差大、降雪量大以及多湿雪雪崩的特点,拟以RS-2U影像为主要监测传感器进行监测,并以哨兵-1号雷达影像、快鸟或高景-1光学影像进行结果的检验和验证.其具体操作步骤按Wesselink等[117]的方法执行.首先是数据前处理,包括各种影像数据的下载、投影坐标系的转换、2×2像素平滑消除斑纹、图像转换成GeoTIFF格式等.第二步,利用掩膜将<5°和>55°的不可能发生雪崩堆积的地形排除;5°和55°这两个阈值的选取符合雪崩的运动规律,McClung等[6,94]将雪崩形成区始发点和雪崩堆积区最远点的连线与水平线的夹角定义为α[94],他发现百年一遇的大雪崩α在15°~50°之间波动,在这个角度之外几乎很少有雪崩活动.根据Johnston等[128]和Delparte等[129]的统计,大多数雪崩的α值介于20°~40°之间.流通区平均坡度介于30°~15°之间,因为雪崩的动能未能全部耗散,冲击力较大,不会有较大粒径的砾石停留,也不会有树龄长的乔木生长.树龄较长的树木一般都出现在堆积区的远端,这些树木因为受到雪崩的冲击产生树木年轮的异常生长或者疤痕,从而成为历史大雪崩定年的证据[130].第三步,利用超宽带测绘带模式(S-1A extra-wide swath mode,S-1A EW)的哨兵-1A影像或者RADARSAT-2的超精细模式(RS-2 ultrafine mode)生成RGB图像.S-1A EW的特点是覆盖范围大、重访期短,其中红色和蓝色通道为无雪崩活动的参考图像,绿色通道为有雪崩图像,在合成图上,绿色一般为雪崩堆积.第四步,雪崩堆积的人工识别,雪崩堆积在雷达影像上一般呈绿色舌状,并向下延伸,在高分辨率的RS-2U图像上很容易辨识,通过对已发生雪崩堆积的判读,可以建立雪崩堆积后向散射的一组阈值,并制作阈值直方图.为了保证阈值的准确,在判读雪崩影像时一般由两名雪崩研究专业人员共同完成.滤波时阈值选取有固定阈值和动态阈值两种方式,Wesselink等[117]采用3 db、Karbou等[131]、Leinss等[91]采用4 db、Vicker等[106]采用6 db的固定值,发现参考影像为湿雪时分类结果不好.在参考影像为干雪时,雪崩暴发前的气象状况也会对雪崩堆积的分类产生影响[132].为了提高分类的准确性,Tompkin等[1]考虑了局地亮度对后向散射的影响,在计算后向散射时进行了局地分辨率权重的多视处理,采用了1.91 db的阈值进行分类,使得召回率和准确率都有了显著的提高.Eckerstorfer等[114]采用动态阈值,即后向散射μ+1.5SD和μ+2.5SD两种阈值,发现高阈值(2.5SD)的K均值聚类的分类效果更好.取值过高,有些雪崩堆积有可能没有被统计在内;取值过低,有些不是雪崩堆积的区域可能被统计进来.第五步,对无雪崩发生的参考图像和有雪崩发生的图像进行5×5像素中值滤波以消除斑纹.第六步,以雪崩活动的后向散射影像减去无雪崩活动的参考影像生成后向散射变化影像.第七步,生成雷达入射角度、顶底倒置以及雷达阴影等不可能发生雪崩的掩膜,以剔除部分地形影响.第八步,对监测影像使用各种掩膜及散射变化阈值,生成雪崩和无雪崩的二元像素分类.第九步,使用去除小斑块RSO滤波器(Remove Small Objects filter),根据影像分辨率,滤除确定雪崩堆积边界的不规则像元.第十步,采用自适应滤波将具有相同性质的像元连接起来,生成雪崩和无雪崩的二元影像图(图6). ...
Evaluation of a snow avalanche possibly triggered by a local earthquake at Vallée de la Sionne, Switzerland
1
2014
... 雪崩活动信息是雪崩定量化研究和灾害科学防灾减灾最为基础的数据.像其他雪崩区一样,藏东南雪崩的各种应对措施也必须建立在可靠的灾害危险性分析和风险评价的基础上[1-5],而详尽的雪崩时空活动信息是雪崩危险性分析和风险评价最重要的基础信息[6].雪崩的位置及规模信息,如发生频次、运动距离、雪崩量、形成区释放雪层厚度等对雪崩风险评价、雪崩区划、雪崩过程模拟、雪崩工程参数的选取及雪崩工程设计都尤为重要.雪崩运动模型的建立及优化高度依赖于可信的雪崩形成区、流通区和堆积区的几何参数[7];而特定气象气候背景和雪体力学性质下的雪崩预测和风险评价模型必须用可信的雪崩活动信息进行检验[8-10].在雪崩工程设计中,工程类型、材质选取、结构设计和应力及强度计算必须以一定的基础数据来支撑,这些数据包括:雪崩运动速度、运动距离、峰值流量、爬高、最大冲击力、雪崩量等[4,11-13],这些数据的历史记录及其发生的概率对雪崩工程的评价也非常重要[14-15]. ...
On the relation between avalanche occurrence and avalanche danger level
2
2020
... 雪崩活动信息是雪崩定量化研究和灾害科学防灾减灾最为基础的数据.像其他雪崩区一样,藏东南雪崩的各种应对措施也必须建立在可靠的灾害危险性分析和风险评价的基础上[1-5],而详尽的雪崩时空活动信息是雪崩危险性分析和风险评价最重要的基础信息[6].雪崩的位置及规模信息,如发生频次、运动距离、雪崩量、形成区释放雪层厚度等对雪崩风险评价、雪崩区划、雪崩过程模拟、雪崩工程参数的选取及雪崩工程设计都尤为重要.雪崩运动模型的建立及优化高度依赖于可信的雪崩形成区、流通区和堆积区的几何参数[7];而特定气象气候背景和雪体力学性质下的雪崩预测和风险评价模型必须用可信的雪崩活动信息进行检验[8-10].在雪崩工程设计中,工程类型、材质选取、结构设计和应力及强度计算必须以一定的基础数据来支撑,这些数据包括:雪崩运动速度、运动距离、峰值流量、爬高、最大冲击力、雪崩量等[4,11-13],这些数据的历史记录及其发生的概率对雪崩工程的评价也非常重要[14-15]. ...
... 雪体稳定度是预测雪崩危险度最重要的因子.研究表明[21-22],雪崩的危险度由低到高可分为五级,主要由雪崩暴发的概率、雪崩规模以及雪崩的激发频率和激发位置决定,具体危险度水平可以查巴伐利亚矩阵(Bavarian Matrix)获得.其中,雪崩暴发概率对雪崩危险度的影响最为显著[8,22],而雪崩暴发概率由雪体稳定度决定,因而可以利用实地监测对试验地点周边100 km2区域的雪崩危险度进行预测预警[23-24].当实时获取的雪崩稳定度较低时,需要对重要公路进行封闭,当雪崩稳定度升高时可以开放公路交通,尽可能减少封闭公路的时间.另外,在雪崩危险度很高的情形之下,还可以选择合适的时机和地点放置丙烷进行爆破除雪. ...
On the correlation between the forecast avalanche danger and avalanche risk taken by backcountry skiers in Switzerland
0
2021
Monitoring snow avalanches in Northwestern Italian Alps using an infrasound array
2
2011
... 雪崩活动信息是雪崩定量化研究和灾害科学防灾减灾最为基础的数据.像其他雪崩区一样,藏东南雪崩的各种应对措施也必须建立在可靠的灾害危险性分析和风险评价的基础上[1-5],而详尽的雪崩时空活动信息是雪崩危险性分析和风险评价最重要的基础信息[6].雪崩的位置及规模信息,如发生频次、运动距离、雪崩量、形成区释放雪层厚度等对雪崩风险评价、雪崩区划、雪崩过程模拟、雪崩工程参数的选取及雪崩工程设计都尤为重要.雪崩运动模型的建立及优化高度依赖于可信的雪崩形成区、流通区和堆积区的几何参数[7];而特定气象气候背景和雪体力学性质下的雪崩预测和风险评价模型必须用可信的雪崩活动信息进行检验[8-10].在雪崩工程设计中,工程类型、材质选取、结构设计和应力及强度计算必须以一定的基础数据来支撑,这些数据包括:雪崩运动速度、运动距离、峰值流量、爬高、最大冲击力、雪崩量等[4,11-13],这些数据的历史记录及其发生的概率对雪崩工程的评价也非常重要[14-15]. ...
... 利用次声波和地震波可以实时记录雪崩事件及其发生的位置,进一步还可以推断雪崩的运动学特征.雪崩密实流和坡面相互作用会释放震动的能量,而粉状雪崩的粉状云前锋挤压空气可以产生次声波,这也使得利用次声波和地震波监测雪崩成为可能[29-30].地震波和次声波与岩崩、地震以及直升机产生的噪声在波形图和频谱图上存在差异[31],因此与延时相机相结合,将地震波和次声波传感器沿雪崩路径布设,可以测量雪崩前锋的运动速度.基于不同位置噪声不相关,而雪崩信号相关的原理,利用几个次声或地震传感器组成阵列可以极大地提高信号的信噪比[32].由于阵列中几个传感器之间存在一定距离,其接收信号的相位、反方位角会呈现明显差异[10,31-33],因而采取波束成形(Beamforming)、多重信号分类(Multiple Signal Classification,MUSIC)[34]等算法可以确定某个时间窗口雪崩前锋所在的位置,并确定雪崩运动的速度. ...
Recent practical and theoretical developments
1
2009
... 雪崩活动信息是雪崩定量化研究和灾害科学防灾减灾最为基础的数据.像其他雪崩区一样,藏东南雪崩的各种应对措施也必须建立在可靠的灾害危险性分析和风险评价的基础上[1-5],而详尽的雪崩时空活动信息是雪崩危险性分析和风险评价最重要的基础信息[6].雪崩的位置及规模信息,如发生频次、运动距离、雪崩量、形成区释放雪层厚度等对雪崩风险评价、雪崩区划、雪崩过程模拟、雪崩工程参数的选取及雪崩工程设计都尤为重要.雪崩运动模型的建立及优化高度依赖于可信的雪崩形成区、流通区和堆积区的几何参数[7];而特定气象气候背景和雪体力学性质下的雪崩预测和风险评价模型必须用可信的雪崩活动信息进行检验[8-10].在雪崩工程设计中,工程类型、材质选取、结构设计和应力及强度计算必须以一定的基础数据来支撑,这些数据包括:雪崩运动速度、运动距离、峰值流量、爬高、最大冲击力、雪崩量等[4,11-13],这些数据的历史记录及其发生的概率对雪崩工程的评价也非常重要[14-15]. ...
Quantitative risk and optimal design approaches in the snow avalanche field: review and extensions
0
2012
Implementation of structural control measures to mitigate avalanche hazard along transportation corridors
1
2010
... 雪崩活动信息是雪崩定量化研究和灾害科学防灾减灾最为基础的数据.像其他雪崩区一样,藏东南雪崩的各种应对措施也必须建立在可靠的灾害危险性分析和风险评价的基础上[1-5],而详尽的雪崩时空活动信息是雪崩危险性分析和风险评价最重要的基础信息[6].雪崩的位置及规模信息,如发生频次、运动距离、雪崩量、形成区释放雪层厚度等对雪崩风险评价、雪崩区划、雪崩过程模拟、雪崩工程参数的选取及雪崩工程设计都尤为重要.雪崩运动模型的建立及优化高度依赖于可信的雪崩形成区、流通区和堆积区的几何参数[7];而特定气象气候背景和雪体力学性质下的雪崩预测和风险评价模型必须用可信的雪崩活动信息进行检验[8-10].在雪崩工程设计中,工程类型、材质选取、结构设计和应力及强度计算必须以一定的基础数据来支撑,这些数据包括:雪崩运动速度、运动距离、峰值流量、爬高、最大冲击力、雪崩量等[4,11-13],这些数据的历史记录及其发生的概率对雪崩工程的评价也非常重要[14-15]. ...
Evaluating the benefit of avalanche protection forest with GIS-based risk analyses: a case study in Switzerland
1
2009
... 雪崩活动信息是雪崩定量化研究和灾害科学防灾减灾最为基础的数据.像其他雪崩区一样,藏东南雪崩的各种应对措施也必须建立在可靠的灾害危险性分析和风险评价的基础上[1-5],而详尽的雪崩时空活动信息是雪崩危险性分析和风险评价最重要的基础信息[6].雪崩的位置及规模信息,如发生频次、运动距离、雪崩量、形成区释放雪层厚度等对雪崩风险评价、雪崩区划、雪崩过程模拟、雪崩工程参数的选取及雪崩工程设计都尤为重要.雪崩运动模型的建立及优化高度依赖于可信的雪崩形成区、流通区和堆积区的几何参数[7];而特定气象气候背景和雪体力学性质下的雪崩预测和风险评价模型必须用可信的雪崩活动信息进行检验[8-10].在雪崩工程设计中,工程类型、材质选取、结构设计和应力及强度计算必须以一定的基础数据来支撑,这些数据包括:雪崩运动速度、运动距离、峰值流量、爬高、最大冲击力、雪崩量等[4,11-13],这些数据的历史记录及其发生的概率对雪崩工程的评价也非常重要[14-15]. ...
Avalanche hazard mitigation strategies assessed by cost effectiveness analyses and cost benefit analyses: evidence from davos, Switzerland
1
2007
... 雪崩活动信息是雪崩定量化研究和灾害科学防灾减灾最为基础的数据.像其他雪崩区一样,藏东南雪崩的各种应对措施也必须建立在可靠的灾害危险性分析和风险评价的基础上[1-5],而详尽的雪崩时空活动信息是雪崩危险性分析和风险评价最重要的基础信息[6].雪崩的位置及规模信息,如发生频次、运动距离、雪崩量、形成区释放雪层厚度等对雪崩风险评价、雪崩区划、雪崩过程模拟、雪崩工程参数的选取及雪崩工程设计都尤为重要.雪崩运动模型的建立及优化高度依赖于可信的雪崩形成区、流通区和堆积区的几何参数[7];而特定气象气候背景和雪体力学性质下的雪崩预测和风险评价模型必须用可信的雪崩活动信息进行检验[8-10].在雪崩工程设计中,工程类型、材质选取、结构设计和应力及强度计算必须以一定的基础数据来支撑,这些数据包括:雪崩运动速度、运动距离、峰值流量、爬高、最大冲击力、雪崩量等[4,11-13],这些数据的历史记录及其发生的概率对雪崩工程的评价也非常重要[14-15]. ...
Automated detection and mapping of avalanche deposits using airborne optical remote sensing data
4
2009
... 雪崩活动记录是雪崩研究中最重要的基础内容之一,但到目前为止通过各种方法获取的雪崩信息依然存在着雪崩时间序列不连续,或者记录不准确等各种问题.即使在雪崩研究比较深入的国家,通常情况下只有那些造成人员伤亡、公用设施遭受严重损失,或者有目击者的雪崩事件才被纳入雪崩观测记录之中[16-18].绝大多数雪崩都有相对固定的坡面或者沟槽,但现有的雪崩编目多以国家级的地理单元为基础,涉及具体的雪崩地形几何形态的观测记录也大多局限在可以到达的区域之内,使得大多数地区的雪崩事件都没有被纳入编目[18-19].在瑞士的阿尔卑斯山区,由于人口相对稠密,雪崩事件的记录相对翔实,而在雪崩研究比较多的挪威,由于人口相对稀少,即使在天气状况良好的时段也只有很少一部分的雪崩事件被观测到[20],雪崩的观测研究还远不能满足生产建设和科研的需要,因此,加强雪崩的观测研究具有十分重要的现实意义和理论意义.随着遥感技术的革新和发展,结合实地观测,通过遥感监测研究雪崩成为雪崩研究的一个重要方向. ...
... 雪崩的遥感监测目前还处于发展的初级阶段[38].2010年前后雪崩堆积的遥感监测主要以光学遥感为主[16],利用面向对象的分类方法雪崩堆积识别的准确率可以达到87%,因为光学无法识别被新雪掩盖的雪崩堆积,西方科学家尝试利用其他的传感器来识别雪崩堆积,合成孔径雷达(SAR)被证明是一种非常有效的方法[39].SAR最初以地面为平台进行雪崩堆积的监测[40],随着哨兵-1号卫星的发射和雪崩监测自动算法的逐步改进,SAR已经在雪崩风险评价和制图方面得到了广泛的应用,并取得了很好的分类效果. ...
... 航空光学遥感最主要的用途是观测地形,因而观测大多在夏季进行,在雪崩形成及动态监测方面的应用并不多.2009年Bühler等[16]利用航空推扫式数字扫描仪绘制了高分辨率的雪崩堆积图,利用雪崩堆积与未受影响的雪面纹理和方向的频谱信息差异,可以将中等到较大规模雪崩堆积与积雪区分,准确率达到了94%.Lato等[17]根据这种扫描仪获得的正射影像资料,采用像元与相邻像元比较的方法,将雪崩堆积作为一个整体对所有观测像元进行分割和分类,两个案例研究的准确率均达到95%和97%.虽然利用肉眼从光学影像很容易把雪崩堆积与未受雪崩影响的雪面区分开来,但对于较大空间尺度上的雪崩堆积的判读,利用人工判读工作量大且费时费力,因而必须借助自动算法来进行识别[17].为了将雪崩堆积与植被、自然降雪及其他地表更好地区分,Korzeniowska等[18]利用OBIA流程,建立了四种特殊参数,对像元进行自动分割及分类,这四种参数是:亮度、NDVI(normalised difference vegetation index)、NDWI(normalised difference water index)以及SDNDWI(NDWI标准差),这种算法极大地降低了图像判别中的脉冲噪声(salt-and-pepper noise). ...
... 掩膜技术是自动监测中最常用的工具,比如坡度掩膜可以大大减少自动监测的工作量.根据McClung等[6]的研究,雪崩堆积区的坡度一般在15°以下,一般认为大于35°的地形就不会产生雪崩堆积[16].地形及障碍物对不同雪崩制动作用不同,粉状雪崩的雪崩云主要的阻力来自空气,密实流层的阻滞主要受地表摩擦和地形的影响,如雪崩沟槽出现转弯,密实流受离心力作用常常会出现弯道超高从而堆积在沟槽的外围.统计显示,在相同的坡度和雪崩量的前提下,沟槽雪崩比坡面雪崩运动速度更快、距离也更远.湿雪雪崩由于雪崩流含水量高,更多地呈现出流体的性质向低处填洼,运动速度慢,但运动距离远.对面的山坡和森林都可以对雪崩产生制动作用,其中森林对雪崩的制动与树木的间距和高度有关,当雪崩规模较大时,雪崩可能会跃过或摧毁森林继续前进.利用ArcGIS软件,采用掩膜的方法可以对坡度大于40°、密林以及开阔水体进行剔除[104].在光学遥感的雪崩堆积监测中,一般采用雪崩堆积与周围环境的亮度、纹理等物理特征对遥感影像进行分类. ...
Automated detection of snow avalanche deposits: Segmentation and classification of optical remote sensing imagery
7
2012
... 积雪具有典型的反射光谱特征.在可见光波段(0.40~0.78 μm),积雪的反射率保持在0.8以上,地表常见地物(如植被、裸土、水体)的反射率在0.5以下[42],利用该差异可区分积雪与地表常见地物.雪崩过程中雪晶碰撞产生热量导致雪体水分的增加、雪崩携带的土壤以及植被砾石等都会明显降低雪崩体的反射率.另外,在雪崩发生后雪崩堆积与周围未受扰动的积雪相比,堆积表面的粗糙度、形状、密度、地表纹理、都会表现出明显的差异,这些差异可以通过光学传感器进行判读[43-45].由于雪崩堆积的纹理一般与坡向一致,Larsen等[46]和Lato等[17]利用基于对象的影像分析(object based image analysis, OBIA)和灰度共生矩阵(grey-level co-occurrence matrix, GLCM)对瑞士和挪威的快鸟和航空ADS40影像建立了归一化差分角指数(normalised difference angle index, NDAI),该指数利用GLCM熵、对比度、亮度等滤波器对雪崩堆积和未受扰动雪面进行了分类,可以准确判别94%的雪崩堆积. ...
... 地基、航空及卫星光学传感器的主要参数[17,38] ...
... Properties of ground based, air-, and spaceborne optical sensors used for avalanche detection and mapping[17,38] ...
... 航空光学遥感最主要的用途是观测地形,因而观测大多在夏季进行,在雪崩形成及动态监测方面的应用并不多.2009年Bühler等[16]利用航空推扫式数字扫描仪绘制了高分辨率的雪崩堆积图,利用雪崩堆积与未受影响的雪面纹理和方向的频谱信息差异,可以将中等到较大规模雪崩堆积与积雪区分,准确率达到了94%.Lato等[17]根据这种扫描仪获得的正射影像资料,采用像元与相邻像元比较的方法,将雪崩堆积作为一个整体对所有观测像元进行分割和分类,两个案例研究的准确率均达到95%和97%.虽然利用肉眼从光学影像很容易把雪崩堆积与未受雪崩影响的雪面区分开来,但对于较大空间尺度上的雪崩堆积的判读,利用人工判读工作量大且费时费力,因而必须借助自动算法来进行识别[17].为了将雪崩堆积与植被、自然降雪及其他地表更好地区分,Korzeniowska等[18]利用OBIA流程,建立了四种特殊参数,对像元进行自动分割及分类,这四种参数是:亮度、NDVI(normalised difference vegetation index)、NDWI(normalised difference water index)以及SDNDWI(NDWI标准差),这种算法极大地降低了图像判别中的脉冲噪声(salt-and-pepper noise). ...
... [17].为了将雪崩堆积与植被、自然降雪及其他地表更好地区分,Korzeniowska等[18]利用OBIA流程,建立了四种特殊参数,对像元进行自动分割及分类,这四种参数是:亮度、NDVI(normalised difference vegetation index)、NDWI(normalised difference water index)以及SDNDWI(NDWI标准差),这种算法极大地降低了图像判别中的脉冲噪声(salt-and-pepper noise). ...
... 航天光学遥感在监测滑坡和地震等自然灾害中应用比较广泛,但利用卫星搭载光学传感器来监测雪崩的研究还比较少.航天光学遥感监测雪崩的基本机理是雪崩暴发前后雪崩的形成区、流通区、堆积区的表面反射率呈现出不同程度的差异,而这些差异可以很直观地从光学影像中得到识别.雪崩三个基本形态分区与未受扰动的积雪表面的反射率也会出现明显的不同,其中以堆积区的变化最为显著,这主要与雪崩后雪崩堆积密度和含水量的增加有关,另外雪崩运动因携带固体物质,如碎屑或者植被,也会造成堆积区表面污化和表面粗糙度变化.相对于星载SAR只能测量中等以上规模的雪崩,卫星重访期长,且影像不直观等局限外,星载的光学遥感也具有自身的优势.Hafner等[68]利用深度学习和神经网络算法对SPOT 6/7影像的雪崩堆积进行识别,取得了很好的分类效果.Larsen等[69]和Lato等[17]利用快鸟卫星的光学影像对挪威西部的雪崩进行了判别研究,他们发现在照明过度以及高纬度地区太阳高度角较小时容易形成曝光不足的区域,人工识别雪崩堆积几乎不可能实现,但合适的自动判别算法可以提高阴影区和过度照明的雪崩判别成功率. ...
... 星载雷达影像在获取雪崩信息后,一般还需要进行检验,测试雷达影像监测雪崩的准确度以及错误率等参数.在可到达的区域可以采用人工直接进行检验,而在人员无法到达的区域,可直接借用其他雷达影像如哨兵-1号进行检验,或者利用高分辨率的光学影像进行检验,如Bühler等[20]、Leinss等[91]采用SPOT6/7光学影像观测的雪崩活动作为标准来检验雷达影像的准确性,而Lato等[17]则利用快鸟影像作为无法直接观测地区雪崩发生的标准.SPOT6/7全色和多光谱的分辨率分别为1.5 m和6 m,而快鸟则分别达到了0.6 m和2.4 m. ...
Regional snow-avalanche detection using object-based image analysis of near-infrared aerial imagery
3
2017
... 雪崩活动记录是雪崩研究中最重要的基础内容之一,但到目前为止通过各种方法获取的雪崩信息依然存在着雪崩时间序列不连续,或者记录不准确等各种问题.即使在雪崩研究比较深入的国家,通常情况下只有那些造成人员伤亡、公用设施遭受严重损失,或者有目击者的雪崩事件才被纳入雪崩观测记录之中[16-18].绝大多数雪崩都有相对固定的坡面或者沟槽,但现有的雪崩编目多以国家级的地理单元为基础,涉及具体的雪崩地形几何形态的观测记录也大多局限在可以到达的区域之内,使得大多数地区的雪崩事件都没有被纳入编目[18-19].在瑞士的阿尔卑斯山区,由于人口相对稠密,雪崩事件的记录相对翔实,而在雪崩研究比较多的挪威,由于人口相对稀少,即使在天气状况良好的时段也只有很少一部分的雪崩事件被观测到[20],雪崩的观测研究还远不能满足生产建设和科研的需要,因此,加强雪崩的观测研究具有十分重要的现实意义和理论意义.随着遥感技术的革新和发展,结合实地观测,通过遥感监测研究雪崩成为雪崩研究的一个重要方向. ...
... [18-19].在瑞士的阿尔卑斯山区,由于人口相对稠密,雪崩事件的记录相对翔实,而在雪崩研究比较多的挪威,由于人口相对稀少,即使在天气状况良好的时段也只有很少一部分的雪崩事件被观测到[20],雪崩的观测研究还远不能满足生产建设和科研的需要,因此,加强雪崩的观测研究具有十分重要的现实意义和理论意义.随着遥感技术的革新和发展,结合实地观测,通过遥感监测研究雪崩成为雪崩研究的一个重要方向. ...
... 航空光学遥感最主要的用途是观测地形,因而观测大多在夏季进行,在雪崩形成及动态监测方面的应用并不多.2009年Bühler等[16]利用航空推扫式数字扫描仪绘制了高分辨率的雪崩堆积图,利用雪崩堆积与未受影响的雪面纹理和方向的频谱信息差异,可以将中等到较大规模雪崩堆积与积雪区分,准确率达到了94%.Lato等[17]根据这种扫描仪获得的正射影像资料,采用像元与相邻像元比较的方法,将雪崩堆积作为一个整体对所有观测像元进行分割和分类,两个案例研究的准确率均达到95%和97%.虽然利用肉眼从光学影像很容易把雪崩堆积与未受雪崩影响的雪面区分开来,但对于较大空间尺度上的雪崩堆积的判读,利用人工判读工作量大且费时费力,因而必须借助自动算法来进行识别[17].为了将雪崩堆积与植被、自然降雪及其他地表更好地区分,Korzeniowska等[18]利用OBIA流程,建立了四种特殊参数,对像元进行自动分割及分类,这四种参数是:亮度、NDVI(normalised difference vegetation index)、NDWI(normalised difference water index)以及SDNDWI(NDWI标准差),这种算法极大地降低了图像判别中的脉冲噪声(salt-and-pepper noise). ...
Potential of operational high spatial resolution near-infrared remote sensing instruments for snow surface type mapping
1
2014
... 雪崩活动记录是雪崩研究中最重要的基础内容之一,但到目前为止通过各种方法获取的雪崩信息依然存在着雪崩时间序列不连续,或者记录不准确等各种问题.即使在雪崩研究比较深入的国家,通常情况下只有那些造成人员伤亡、公用设施遭受严重损失,或者有目击者的雪崩事件才被纳入雪崩观测记录之中[16-18].绝大多数雪崩都有相对固定的坡面或者沟槽,但现有的雪崩编目多以国家级的地理单元为基础,涉及具体的雪崩地形几何形态的观测记录也大多局限在可以到达的区域之内,使得大多数地区的雪崩事件都没有被纳入编目[18-19].在瑞士的阿尔卑斯山区,由于人口相对稠密,雪崩事件的记录相对翔实,而在雪崩研究比较多的挪威,由于人口相对稀少,即使在天气状况良好的时段也只有很少一部分的雪崩事件被观测到[20],雪崩的观测研究还远不能满足生产建设和科研的需要,因此,加强雪崩的观测研究具有十分重要的现实意义和理论意义.随着遥感技术的革新和发展,结合实地观测,通过遥感监测研究雪崩成为雪崩研究的一个重要方向. ...
Where are the avalanches? Rapid SPOT6 satellite data acquisition to map an extreme avalanche period over the Swiss Alps
3
2019
... 雪崩活动记录是雪崩研究中最重要的基础内容之一,但到目前为止通过各种方法获取的雪崩信息依然存在着雪崩时间序列不连续,或者记录不准确等各种问题.即使在雪崩研究比较深入的国家,通常情况下只有那些造成人员伤亡、公用设施遭受严重损失,或者有目击者的雪崩事件才被纳入雪崩观测记录之中[16-18].绝大多数雪崩都有相对固定的坡面或者沟槽,但现有的雪崩编目多以国家级的地理单元为基础,涉及具体的雪崩地形几何形态的观测记录也大多局限在可以到达的区域之内,使得大多数地区的雪崩事件都没有被纳入编目[18-19].在瑞士的阿尔卑斯山区,由于人口相对稠密,雪崩事件的记录相对翔实,而在雪崩研究比较多的挪威,由于人口相对稀少,即使在天气状况良好的时段也只有很少一部分的雪崩事件被观测到[20],雪崩的观测研究还远不能满足生产建设和科研的需要,因此,加强雪崩的观测研究具有十分重要的现实意义和理论意义.随着遥感技术的革新和发展,结合实地观测,通过遥感监测研究雪崩成为雪崩研究的一个重要方向. ...
... Eckerstorfer等[70]在挪威北部利用Landsat-8全色影像人工判读了大型雪崩堆积,分辨率15 m,并以此作为Radar判读雪崩堆积的标准.Bühler等[20]利用SPOT6和SPOT7影像以及图像增强技术人工判读瑞士12 500 km2范围内包括过度照明以及阴影区18 737条雪崩堆积,与其后的直升机获取的照片进行对照,发现可以利用高分辨率的光学卫星影像对某个雪崩周期内大范围的雪崩活动进行监测,高分辨卫星获取的雪崩活动信息具有可靠性、完备性和准确性. ...
... 星载雷达影像在获取雪崩信息后,一般还需要进行检验,测试雷达影像监测雪崩的准确度以及错误率等参数.在可到达的区域可以采用人工直接进行检验,而在人员无法到达的区域,可直接借用其他雷达影像如哨兵-1号进行检验,或者利用高分辨率的光学影像进行检验,如Bühler等[20]、Leinss等[91]采用SPOT6/7光学影像观测的雪崩活动作为标准来检验雷达影像的准确性,而Lato等[17]则利用快鸟影像作为无法直接观测地区雪崩发生的标准.SPOT6/7全色和多光谱的分辨率分别为1.5 m和6 m,而快鸟则分别达到了0.6 m和2.4 m. ...
Towards an improved European auxiliary matrix for assessing avalanche danger levels
1
2016
... 雪体稳定度是预测雪崩危险度最重要的因子.研究表明[21-22],雪崩的危险度由低到高可分为五级,主要由雪崩暴发的概率、雪崩规模以及雪崩的激发频率和激发位置决定,具体危险度水平可以查巴伐利亚矩阵(Bavarian Matrix)获得.其中,雪崩暴发概率对雪崩危险度的影响最为显著[8,22],而雪崩暴发概率由雪体稳定度决定,因而可以利用实地监测对试验地点周边100 km2区域的雪崩危险度进行预测预警[23-24].当实时获取的雪崩稳定度较低时,需要对重要公路进行封闭,当雪崩稳定度升高时可以开放公路交通,尽可能减少封闭公路的时间.另外,在雪崩危险度很高的情形之下,还可以选择合适的时机和地点放置丙烷进行爆破除雪. ...
On the importance of snowpack stability, the frequency distribution of snowpack stability, and avalanche size in assessing the avalanche danger level
2
2020
... 雪体稳定度是预测雪崩危险度最重要的因子.研究表明[21-22],雪崩的危险度由低到高可分为五级,主要由雪崩暴发的概率、雪崩规模以及雪崩的激发频率和激发位置决定,具体危险度水平可以查巴伐利亚矩阵(Bavarian Matrix)获得.其中,雪崩暴发概率对雪崩危险度的影响最为显著[8,22],而雪崩暴发概率由雪体稳定度决定,因而可以利用实地监测对试验地点周边100 km2区域的雪崩危险度进行预测预警[23-24].当实时获取的雪崩稳定度较低时,需要对重要公路进行封闭,当雪崩稳定度升高时可以开放公路交通,尽可能减少封闭公路的时间.另外,在雪崩危险度很高的情形之下,还可以选择合适的时机和地点放置丙烷进行爆破除雪. ...
... ,22],而雪崩暴发概率由雪体稳定度决定,因而可以利用实地监测对试验地点周边100 km2区域的雪崩危险度进行预测预警[23-24].当实时获取的雪崩稳定度较低时,需要对重要公路进行封闭,当雪崩稳定度升高时可以开放公路交通,尽可能减少封闭公路的时间.另外,在雪崩危险度很高的情形之下,还可以选择合适的时机和地点放置丙烷进行爆破除雪. ...
On using local avalanche danger level estimates for regional forecast verification
1
2017
... 雪体稳定度是预测雪崩危险度最重要的因子.研究表明[21-22],雪崩的危险度由低到高可分为五级,主要由雪崩暴发的概率、雪崩规模以及雪崩的激发频率和激发位置决定,具体危险度水平可以查巴伐利亚矩阵(Bavarian Matrix)获得.其中,雪崩暴发概率对雪崩危险度的影响最为显著[8,22],而雪崩暴发概率由雪体稳定度决定,因而可以利用实地监测对试验地点周边100 km2区域的雪崩危险度进行预测预警[23-24].当实时获取的雪崩稳定度较低时,需要对重要公路进行封闭,当雪崩稳定度升高时可以开放公路交通,尽可能减少封闭公路的时间.另外,在雪崩危险度很高的情形之下,还可以选择合适的时机和地点放置丙烷进行爆破除雪. ...
Spatial consistency and bias in avalanche forecasts: a case study in the European Alps
1
2018
... 雪体稳定度是预测雪崩危险度最重要的因子.研究表明[21-22],雪崩的危险度由低到高可分为五级,主要由雪崩暴发的概率、雪崩规模以及雪崩的激发频率和激发位置决定,具体危险度水平可以查巴伐利亚矩阵(Bavarian Matrix)获得.其中,雪崩暴发概率对雪崩危险度的影响最为显著[8,22],而雪崩暴发概率由雪体稳定度决定,因而可以利用实地监测对试验地点周边100 km2区域的雪崩危险度进行预测预警[23-24].当实时获取的雪崩稳定度较低时,需要对重要公路进行封闭,当雪崩稳定度升高时可以开放公路交通,尽可能减少封闭公路的时间.另外,在雪崩危险度很高的情形之下,还可以选择合适的时机和地点放置丙烷进行爆破除雪. ...
A short and personal history of snow avalanche dynamics
1
2004
... 雪崩定点观测最主要的功能是建立和校正雪崩的物理-动力学模型,这类模型通常运用在潜在危险性分析和雪崩危险性制图上[25].物理-动力学模型的基本原理是雪崩流的运动主要受相对粗糙度和库伦摩擦影响,而与雷诺数无关.欧洲相关国家利用阿尔卑斯山的长期定点观测结果依次开发了Voellmy-Salm、AVAL-1D(流动雪崩FL-1D和粉状雪崩SL-1D)、RAMMS(rapid mass movement system)、SamosAT等模型,模型从一维、二维到三维,干摩擦系数μ和湍流系数ξ也从取固定值升级到分段取值.利用动力学模型可以模拟真实地形下的雪崩流高度、沿雪崩路径的流速和冲击力、雪崩最远运动距离以及雪崩堆积的质量分布,进一步还可以进行雪崩风险分析、雪崩区划和土地利用规划.雪崩定点观测和物理动力学模拟的交互改进可以提高动力学模型模拟的准确性.在人迹罕至或雪崩观测缺乏的地区进行公路铁路选线、土地利用以及雪崩工程防治时,雪崩动力学模型可以提供较为可靠的数据支撑. ...
Avalanche action on rigid structures: Back-analysis of Taconnaz deflective walls' collapse in February 1999
1
2007
... 雪崩定点观测的高频数据对雪崩工程的设计至关重要.当前雪崩工程设计存在的重要问题是采用雪崩的冲击力参数过小,导致导雪工程和拦雪坝因设计强度过低而被雪崩冲毁[26-27],这是因为由冲击力公式估算得出的冲击力在时间空间都是一种平均状态.定点观测中冲击力传感器的频率至少在2 000 Hz以上[28],可以极大地解决工程设计中的参数选取问题. ...
Static and dynamic FE analysis of an RC protective structure dedicated to snow avalanche mitigation
1
2015
... 雪崩定点观测的高频数据对雪崩工程的设计至关重要.当前雪崩工程设计存在的重要问题是采用雪崩的冲击力参数过小,导致导雪工程和拦雪坝因设计强度过低而被雪崩冲毁[26-27],这是因为由冲击力公式估算得出的冲击力在时间空间都是一种平均状态.定点观测中冲击力传感器的频率至少在2 000 Hz以上[28],可以极大地解决工程设计中的参数选取问题. ...
Air pressure data from the Vallée de la Sionne avalanches of 2004
2
2005
... 雪崩定点观测的高频数据对雪崩工程的设计至关重要.当前雪崩工程设计存在的重要问题是采用雪崩的冲击力参数过小,导致导雪工程和拦雪坝因设计强度过低而被雪崩冲毁[26-27],这是因为由冲击力公式估算得出的冲击力在时间空间都是一种平均状态.定点观测中冲击力传感器的频率至少在2 000 Hz以上[28],可以极大地解决工程设计中的参数选取问题. ...
... 研究区域的选择在嘎隆拉隧道上方的沟槽,最高海拔4 569 m,最大雪崩形成区下缘海拔4 418 m.形成区坡度35.8°,包含三个潜在雪崩释放区.通过架设不同的传感器测量不同的雪崩参数(图5),其中:用高度20 m桅杆在不同高度架设压电开关、光电传感器测量雪崩流高度、密度和速度剖面[124-126].因为仪器测量为介入式观测,利用悬臂可以最大限度减少仪器对雪崩流的影响.此外还可以测量雪崩流冲击下承载体的形变[28],进一步还可以研究雪崩流与人工建筑之间的相互作用,如利用6.5 m的窄楔(narrow wedge)测量雪崩流的冲击力以及窄楔所受应力的9个分量[127],这些数据都是雪崩工程设计最基础的参数.数据采集系统设计中,冲击力、运动速度和雪崩流高度的取样频率一般应在2 000 Hz以上. ...
Infrasound array criteria for automatic detection and front velocity estimation of snow avalanches: towards a real-time early-warning system
1
2015
... 利用次声波和地震波可以实时记录雪崩事件及其发生的位置,进一步还可以推断雪崩的运动学特征.雪崩密实流和坡面相互作用会释放震动的能量,而粉状雪崩的粉状云前锋挤压空气可以产生次声波,这也使得利用次声波和地震波监测雪崩成为可能[29-30].地震波和次声波与岩崩、地震以及直升机产生的噪声在波形图和频谱图上存在差异[31],因此与延时相机相结合,将地震波和次声波传感器沿雪崩路径布设,可以测量雪崩前锋的运动速度.基于不同位置噪声不相关,而雪崩信号相关的原理,利用几个次声或地震传感器组成阵列可以极大地提高信号的信噪比[32].由于阵列中几个传感器之间存在一定距离,其接收信号的相位、反方位角会呈现明显差异[10,31-33],因而采取波束成形(Beamforming)、多重信号分类(Multiple Signal Classification,MUSIC)[34]等算法可以确定某个时间窗口雪崩前锋所在的位置,并确定雪崩运动的速度. ...
Seismo-acoustic energy partitioning of a powder snow avalanche
4
2020
... 利用次声波和地震波可以实时记录雪崩事件及其发生的位置,进一步还可以推断雪崩的运动学特征.雪崩密实流和坡面相互作用会释放震动的能量,而粉状雪崩的粉状云前锋挤压空气可以产生次声波,这也使得利用次声波和地震波监测雪崩成为可能[29-30].地震波和次声波与岩崩、地震以及直升机产生的噪声在波形图和频谱图上存在差异[31],因此与延时相机相结合,将地震波和次声波传感器沿雪崩路径布设,可以测量雪崩前锋的运动速度.基于不同位置噪声不相关,而雪崩信号相关的原理,利用几个次声或地震传感器组成阵列可以极大地提高信号的信噪比[32].由于阵列中几个传感器之间存在一定距离,其接收信号的相位、反方位角会呈现明显差异[10,31-33],因而采取波束成形(Beamforming)、多重信号分类(Multiple Signal Classification,MUSIC)[34]等算法可以确定某个时间窗口雪崩前锋所在的位置,并确定雪崩运动的速度. ...
... 由于雪崩形成地震波和次声波的机理不同,两者各自都有适合监测的目标[30,35].次声波适合监测粉状雪崩和雪崩运动的开始,而地震波适合观测湿雪崩和雪崩运动的结束[30,36].近年来的研究发现次声波监测比震动监测具有更大的优势,其原因不仅仅在于次声的衰减较慢,还在于次声波观测的反方位角具有更好的连续性[30],可以更好地进行雪崩的定位[2,37]. ...
... [30,36].近年来的研究发现次声波监测比震动监测具有更大的优势,其原因不仅仅在于次声的衰减较慢,还在于次声波观测的反方位角具有更好的连续性[30],可以更好地进行雪崩的定位[2,37]. ...
... [30],可以更好地进行雪崩的定位[2,37]. ...
Monitoring of snow avalanches using a seismic array: location, speed estimation, and relationships to meteorological variables
2
2012
... 利用次声波和地震波可以实时记录雪崩事件及其发生的位置,进一步还可以推断雪崩的运动学特征.雪崩密实流和坡面相互作用会释放震动的能量,而粉状雪崩的粉状云前锋挤压空气可以产生次声波,这也使得利用次声波和地震波监测雪崩成为可能[29-30].地震波和次声波与岩崩、地震以及直升机产生的噪声在波形图和频谱图上存在差异[31],因此与延时相机相结合,将地震波和次声波传感器沿雪崩路径布设,可以测量雪崩前锋的运动速度.基于不同位置噪声不相关,而雪崩信号相关的原理,利用几个次声或地震传感器组成阵列可以极大地提高信号的信噪比[32].由于阵列中几个传感器之间存在一定距离,其接收信号的相位、反方位角会呈现明显差异[10,31-33],因而采取波束成形(Beamforming)、多重信号分类(Multiple Signal Classification,MUSIC)[34]等算法可以确定某个时间窗口雪崩前锋所在的位置,并确定雪崩运动的速度. ...
... ,31-33],因而采取波束成形(Beamforming)、多重信号分类(Multiple Signal Classification,MUSIC)[34]等算法可以确定某个时间窗口雪崩前锋所在的位置,并确定雪崩运动的速度. ...
Calculating the velocity of a fast-moving snow avalanche using an infrasound array
1
2014
... 利用次声波和地震波可以实时记录雪崩事件及其发生的位置,进一步还可以推断雪崩的运动学特征.雪崩密实流和坡面相互作用会释放震动的能量,而粉状雪崩的粉状云前锋挤压空气可以产生次声波,这也使得利用次声波和地震波监测雪崩成为可能[29-30].地震波和次声波与岩崩、地震以及直升机产生的噪声在波形图和频谱图上存在差异[31],因此与延时相机相结合,将地震波和次声波传感器沿雪崩路径布设,可以测量雪崩前锋的运动速度.基于不同位置噪声不相关,而雪崩信号相关的原理,利用几个次声或地震传感器组成阵列可以极大地提高信号的信噪比[32].由于阵列中几个传感器之间存在一定距离,其接收信号的相位、反方位角会呈现明显差异[10,31-33],因而采取波束成形(Beamforming)、多重信号分类(Multiple Signal Classification,MUSIC)[34]等算法可以确定某个时间窗口雪崩前锋所在的位置,并确定雪崩运动的速度. ...
Using local infrasound arrays to detect plunging snow avalanches along the Milford Road, New Zealand (Aotearoa)
1
2022
... 利用次声波和地震波可以实时记录雪崩事件及其发生的位置,进一步还可以推断雪崩的运动学特征.雪崩密实流和坡面相互作用会释放震动的能量,而粉状雪崩的粉状云前锋挤压空气可以产生次声波,这也使得利用次声波和地震波监测雪崩成为可能[29-30].地震波和次声波与岩崩、地震以及直升机产生的噪声在波形图和频谱图上存在差异[31],因此与延时相机相结合,将地震波和次声波传感器沿雪崩路径布设,可以测量雪崩前锋的运动速度.基于不同位置噪声不相关,而雪崩信号相关的原理,利用几个次声或地震传感器组成阵列可以极大地提高信号的信噪比[32].由于阵列中几个传感器之间存在一定距离,其接收信号的相位、反方位角会呈现明显差异[10,31-33],因而采取波束成形(Beamforming)、多重信号分类(Multiple Signal Classification,MUSIC)[34]等算法可以确定某个时间窗口雪崩前锋所在的位置,并确定雪崩运动的速度. ...
Analysis of seismic waves crossing the Santa Clara Valley using the three-component MUSIQUE array algorithm
1
2016
... 利用次声波和地震波可以实时记录雪崩事件及其发生的位置,进一步还可以推断雪崩的运动学特征.雪崩密实流和坡面相互作用会释放震动的能量,而粉状雪崩的粉状云前锋挤压空气可以产生次声波,这也使得利用次声波和地震波监测雪崩成为可能[29-30].地震波和次声波与岩崩、地震以及直升机产生的噪声在波形图和频谱图上存在差异[31],因此与延时相机相结合,将地震波和次声波传感器沿雪崩路径布设,可以测量雪崩前锋的运动速度.基于不同位置噪声不相关,而雪崩信号相关的原理,利用几个次声或地震传感器组成阵列可以极大地提高信号的信噪比[32].由于阵列中几个传感器之间存在一定距离,其接收信号的相位、反方位角会呈现明显差异[10,31-33],因而采取波束成形(Beamforming)、多重信号分类(Multiple Signal Classification,MUSIC)[34]等算法可以确定某个时间窗口雪崩前锋所在的位置,并确定雪崩运动的速度. ...
Frontal dynamics of powder snow avalanches
1
2013
... 由于雪崩形成地震波和次声波的机理不同,两者各自都有适合监测的目标[30,35].次声波适合监测粉状雪崩和雪崩运动的开始,而地震波适合观测湿雪崩和雪崩运动的结束[30,36].近年来的研究发现次声波监测比震动监测具有更大的优势,其原因不仅仅在于次声的衰减较慢,还在于次声波观测的反方位角具有更好的连续性[30],可以更好地进行雪崩的定位[2,37]. ...
On the complementariness of infrasound and seismic sensors for monitoring snow avalanches
1
2011
... 由于雪崩形成地震波和次声波的机理不同,两者各自都有适合监测的目标[30,35].次声波适合监测粉状雪崩和雪崩运动的开始,而地震波适合观测湿雪崩和雪崩运动的结束[30,36].近年来的研究发现次声波监测比震动监测具有更大的优势,其原因不仅仅在于次声的衰减较慢,还在于次声波观测的反方位角具有更好的连续性[30],可以更好地进行雪崩的定位[2,37]. ...
Evaluating the performance of an operational infrasound avalanche detection system at three locations in the Swiss Alps during two winter seasons
1
2020
... 由于雪崩形成地震波和次声波的机理不同,两者各自都有适合监测的目标[30,35].次声波适合监测粉状雪崩和雪崩运动的开始,而地震波适合观测湿雪崩和雪崩运动的结束[30,36].近年来的研究发现次声波监测比震动监测具有更大的优势,其原因不仅仅在于次声的衰减较慢,还在于次声波观测的反方位角具有更好的连续性[30],可以更好地进行雪崩的定位[2,37]. ...
Remote sensing of snow avalanches: recent advances, potential, and limitations
7
2016
... 雪崩的遥感监测目前还处于发展的初级阶段[38].2010年前后雪崩堆积的遥感监测主要以光学遥感为主[16],利用面向对象的分类方法雪崩堆积识别的准确率可以达到87%,因为光学无法识别被新雪掩盖的雪崩堆积,西方科学家尝试利用其他的传感器来识别雪崩堆积,合成孔径雷达(SAR)被证明是一种非常有效的方法[39].SAR最初以地面为平台进行雪崩堆积的监测[40],随着哨兵-1号卫星的发射和雪崩监测自动算法的逐步改进,SAR已经在雪崩风险评价和制图方面得到了广泛的应用,并取得了很好的分类效果. ...
... 地基、航空及卫星光学传感器的主要参数[17,38] ...
... Properties of ground based, air-, and spaceborne optical sensors used for avalanche detection and mapping[17,38] ...
... 各种雪崩监测雷达的参数特征(根据文献[38]修改) ...
... Properties of ground based, air-, and spaceborne radar sensors used for avalanche detection (Revised on the basis of Reference [38]) ...
... 航空雷达目前在雪崩监测方面的应用很少,但Eckerstorfer等[38]认为航空SAR监测雪崩在技术手段上是完全可行的,如德国航天中心(Deutsches Zentrum für Luft- und Raumfahrt,DLR)使用了E-SAR,采用X、C、L、P波段,波长范围3~85 cm,可以利用单轨或者重复轨道对雪崩进行实时监测. ...
... 雪崩的遥感监测通常受以下几个方面因素的影响:监测时间间隔、监测范围、空间分辨率、监测费用、对天气的依赖状况、技术难度、操作难易程度等.Frauenfelder等[113]指出通过遥感获取雪崩记录的可靠性是雪崩预测模型是否准确的基础,而监测中小规模的雪崩时遥感数据的水平分辨率是最主要的制约因素,Eckerstorfer等[38]认为,监测雪崩运动距离介于10~100 m的小型雪崩时,遥感数据的分辨率必须小于30 m.只有在分辨率得到保证时,监测的漏分误差(omission error)和错分误差(commision eror)才可能减小.在雪崩规模较大、雪崩堆积与周边环境对比度较大或者雷达入射角较为有利时,一些分辨率较高的雷达卫星数据如哨兵-1号才可以使用.但分辨率较高时幅宽一般都较小,观测范围有限. ...
Model investigations of backscatter for snow profiles related to avalanche risk
1
2014
... 雪崩的遥感监测目前还处于发展的初级阶段[38].2010年前后雪崩堆积的遥感监测主要以光学遥感为主[16],利用面向对象的分类方法雪崩堆积识别的准确率可以达到87%,因为光学无法识别被新雪掩盖的雪崩堆积,西方科学家尝试利用其他的传感器来识别雪崩堆积,合成孔径雷达(SAR)被证明是一种非常有效的方法[39].SAR最初以地面为平台进行雪崩堆积的监测[40],随着哨兵-1号卫星的发射和雪崩监测自动算法的逐步改进,SAR已经在雪崩风险评价和制图方面得到了广泛的应用,并取得了很好的分类效果. ...
A GB-SAR processor for snow avalanche identification
2
2008
... 雪崩的遥感监测目前还处于发展的初级阶段[38].2010年前后雪崩堆积的遥感监测主要以光学遥感为主[16],利用面向对象的分类方法雪崩堆积识别的准确率可以达到87%,因为光学无法识别被新雪掩盖的雪崩堆积,西方科学家尝试利用其他的传感器来识别雪崩堆积,合成孔径雷达(SAR)被证明是一种非常有效的方法[39].SAR最初以地面为平台进行雪崩堆积的监测[40],随着哨兵-1号卫星的发射和雪崩监测自动算法的逐步改进,SAR已经在雪崩风险评价和制图方面得到了广泛的应用,并取得了很好的分类效果. ...
... 雪崩堆积的后向散射会呈现显著的物理性质变化,从而降低散射时域的关联性,这种关联性即相干性.Martinez-Vazquez等[40]利用地基线性SAR采用C波段5.8 GHz获取了雪崩的干涉位相图,经过相干性分析、相位解缠、大气相位校正、地理编码等步骤对雪崩堆积进行分类,发现观测的正确率达到73.5%,漏报率(false-negative rating)为7.4%.分类的结果对分类阈值的选取比较敏感.此外,他们还发现利用地基差分干涉SAR(DInSAR)获取雪崩体积具有可行性. ...
Automated avalanche hazard indication mapping on a statewide scale
1
2022
... 雪崩遥感监测的结果可以应用于雪崩的危险性分析和风险评价.雪崩的危险性分析包括两个方面:第一个是根据已经观测的雪崩历史记录分析雪崩发生时的各种情景及其发生的概率;其次是根据当前雪崩潜在的成灾因素评估未来雪崩发生的类型和强度(指破坏力:堆积区运动距离、堆积体积和冲击力).前一个是后向计算(backward facing indication),而后一个是前向预测(forward looking indication)[4].灾害的风险评价主要是评估各种雪崩情景下潜在的危害情况,主要与承灾体和暴露状况有关.雪崩发生的历史记录是雪崩危险性分析和风险评价的基础,在雪崩观测资料较少的情况下仍可以制作雪崩危险性图[Hazard (indication) maps],一般比例尺为1∶10 000~1∶50 000[41],主要反映雪崩发生的极端情景下的最大运动距离和雪崩堆积范围,一般不够详细和准确;如果观测时间序列较长则可以制作包含发生频率和强度的雪崩危险度区划图(hazard zone planning maps),一般比例尺为1∶2 000~1∶10 000.雪崩危险度区划是雪崩危险区土地利用、基础设施选线和选址,以及雪崩工程防治的基础和标准. ...
Automated identification of potential snow avalanche release areas based on digital elevation models
1
2013
... 积雪具有典型的反射光谱特征.在可见光波段(0.40~0.78 μm),积雪的反射率保持在0.8以上,地表常见地物(如植被、裸土、水体)的反射率在0.5以下[42],利用该差异可区分积雪与地表常见地物.雪崩过程中雪晶碰撞产生热量导致雪体水分的增加、雪崩携带的土壤以及植被砾石等都会明显降低雪崩体的反射率.另外,在雪崩发生后雪崩堆积与周围未受扰动的积雪相比,堆积表面的粗糙度、形状、密度、地表纹理、都会表现出明显的差异,这些差异可以通过光学传感器进行判读[43-45].由于雪崩堆积的纹理一般与坡向一致,Larsen等[46]和Lato等[17]利用基于对象的影像分析(object based image analysis, OBIA)和灰度共生矩阵(grey-level co-occurrence matrix, GLCM)对瑞士和挪威的快鸟和航空ADS40影像建立了归一化差分角指数(normalised difference angle index, NDAI),该指数利用GLCM熵、对比度、亮度等滤波器对雪崩堆积和未受扰动雪面进行了分类,可以准确判别94%的雪崩堆积. ...
Measurement of directional and spectral signatures of light reflectance by snow
1
2005
... 积雪具有典型的反射光谱特征.在可见光波段(0.40~0.78 μm),积雪的反射率保持在0.8以上,地表常见地物(如植被、裸土、水体)的反射率在0.5以下[42],利用该差异可区分积雪与地表常见地物.雪崩过程中雪晶碰撞产生热量导致雪体水分的增加、雪崩携带的土壤以及植被砾石等都会明显降低雪崩体的反射率.另外,在雪崩发生后雪崩堆积与周围未受扰动的积雪相比,堆积表面的粗糙度、形状、密度、地表纹理、都会表现出明显的差异,这些差异可以通过光学传感器进行判读[43-45].由于雪崩堆积的纹理一般与坡向一致,Larsen等[46]和Lato等[17]利用基于对象的影像分析(object based image analysis, OBIA)和灰度共生矩阵(grey-level co-occurrence matrix, GLCM)对瑞士和挪威的快鸟和航空ADS40影像建立了归一化差分角指数(normalised difference angle index, NDAI),该指数利用GLCM熵、对比度、亮度等滤波器对雪崩堆积和未受扰动雪面进行了分类,可以准确判别94%的雪崩堆积. ...
Classification of glacier zones in western Greenland using albedo and surface roughness from the Multi-angle Imaging SpectroRadiometer (MISR)
0
2007
Estimating sub-pixel surface roughness using remotely sensed stereoscopic data
1
2005
... 积雪具有典型的反射光谱特征.在可见光波段(0.40~0.78 μm),积雪的反射率保持在0.8以上,地表常见地物(如植被、裸土、水体)的反射率在0.5以下[42],利用该差异可区分积雪与地表常见地物.雪崩过程中雪晶碰撞产生热量导致雪体水分的增加、雪崩携带的土壤以及植被砾石等都会明显降低雪崩体的反射率.另外,在雪崩发生后雪崩堆积与周围未受扰动的积雪相比,堆积表面的粗糙度、形状、密度、地表纹理、都会表现出明显的差异,这些差异可以通过光学传感器进行判读[43-45].由于雪崩堆积的纹理一般与坡向一致,Larsen等[46]和Lato等[17]利用基于对象的影像分析(object based image analysis, OBIA)和灰度共生矩阵(grey-level co-occurrence matrix, GLCM)对瑞士和挪威的快鸟和航空ADS40影像建立了归一化差分角指数(normalised difference angle index, NDAI),该指数利用GLCM熵、对比度、亮度等滤波器对雪崩堆积和未受扰动雪面进行了分类,可以准确判别94%的雪崩堆积. ...
Developing nationwide avalanche terrain maps for Norway
2
2020
... 积雪具有典型的反射光谱特征.在可见光波段(0.40~0.78 μm),积雪的反射率保持在0.8以上,地表常见地物(如植被、裸土、水体)的反射率在0.5以下[42],利用该差异可区分积雪与地表常见地物.雪崩过程中雪晶碰撞产生热量导致雪体水分的增加、雪崩携带的土壤以及植被砾石等都会明显降低雪崩体的反射率.另外,在雪崩发生后雪崩堆积与周围未受扰动的积雪相比,堆积表面的粗糙度、形状、密度、地表纹理、都会表现出明显的差异,这些差异可以通过光学传感器进行判读[43-45].由于雪崩堆积的纹理一般与坡向一致,Larsen等[46]和Lato等[17]利用基于对象的影像分析(object based image analysis, OBIA)和灰度共生矩阵(grey-level co-occurrence matrix, GLCM)对瑞士和挪威的快鸟和航空ADS40影像建立了归一化差分角指数(normalised difference angle index, NDAI),该指数利用GLCM熵、对比度、亮度等滤波器对雪崩堆积和未受扰动雪面进行了分类,可以准确判别94%的雪崩堆积. ...
... 在当前的雪崩危险性和风险评估中,LiDAR也发挥着重要的作用.每次雪崩发生时雪崩形成区中的释放区通常都不尽相同,危险性分析中释放区通常通过分析高分辨率DEM(一般大于10 m)的坡度、朝向、起伏度和曲率来确定[46,62],LiDAR测量的高分辨率和高精度的雪深资料可以极大地提高雪崩释放区识别和雪崩风险评估的准确性,并被广泛应用到偏远地区的雪崩风险制图中[3,74].冬季积雪能通过填洼改变地形的表面特征,不同的冬季地表特征对随后的雪崩运动特征有显著影响,积雪模型中的干摩擦系数和库伦摩擦系数的选取对模型模拟的结果有很大影响,LiDAR获取的冬季积雪深度对这两种摩擦系数的确定有非常重要的参考价值.当前在获取雪崩释放区DEM时,飞机或无人机搭载的LiDAR传感器已逐渐取代了传统的摄影测量. ...
Monitoring snow cornice development using time-lapse photography
3
2014
... 通过对已有高分辨率的光学遥感数据进行训练,可以开发雪崩堆积监测的算法,并在实际中加以验证和应用.当前光学遥感主要利用延时摄影技术,已经有成熟的摄影监测技术对雪檐雪崩的动力学过程进行监测[47],即利用地面或无人机搭载的数码相机摄影影像以及移动重构技术(structure-from-motion, SfM),对雪崩堆积进行三维建模,通过对雪崩前后的数字高程模型DEM(digital elevation model)和数字表面模型DSM(digital surface model)相减还可以计算雪崩堆积体的体积. ...
... 当前地基光学遥感还用于对滑动雪崩(glide avalanche)和雪檐雪崩(cornice)的监测,延时可见光相机可以连续监测滑动雪崩[52]、雪檐雪崩(conice或snowbank)[53].将照相机固定在有利的观测点上,将连续拍摄的影像做成动画,可以直观地观测滑动雪崩张性裂隙的扩展和雪檐雪崩中雪堤的生长,利用观测结果可以研究两类雪崩的发生机理,并进行预测预警.Munroe[53]、van Herwijnen等[47]和Vogel等[54]分别利用不同型号的延时相机观测了东南阿拉斯加和挪威斯瓦尔巴德的雪檐雪崩,在Munroe[53]的研究中,他用延时相机图像揭示了犹他州雪檐增长主要与风吹雪有关,并将19个雪檐雪崩按机理分为两类:一类是降雪风吹雪引起的雪檐载荷的增加;另一类是温度快速升高导致的雪檐强度的降低.van Herwijnen等[47]和Vogel等[54]的研究发现雪檐雪崩由降雪和风吹雪形成,但雪崩发生的时机和当时的气象条件关系并不大,强降雪后的强风只对小规模的雪檐雪崩有指示作用,而大规模的雪檐雪崩与雪檐产生裂隙的时机有关,一般发生在裂隙产生的4~5周内,雪崩的规模只与雪檐裂解的雪体体积有关. ...
... [47]和Vogel等[54]的研究发现雪檐雪崩由降雪和风吹雪形成,但雪崩发生的时机和当时的气象条件关系并不大,强降雪后的强风只对小规模的雪檐雪崩有指示作用,而大规模的雪檐雪崩与雪檐产生裂隙的时机有关,一般发生在裂隙产生的4~5周内,雪崩的规模只与雪檐裂解的雪体体积有关. ...
Comparison of avalanche-velocity measurements by means of pulsed Doppler radar, continuous wave radar and optical methods
1
2007
... 除常规的观测雪崩事件外,地基光学遥感最适合进行滑动雪崩和雪檐雪崩的连续观测,并对这两类雪崩进行预测预警.此外,利用地基光学传感器还可以独立或者与地震和次声传感器相结合进行雪崩前锋速度的观测[48-49],在某些雪崩模型的实地验证中,地基光学测量常被用来测量雪崩云的高度[50]. ...
Velocities for the dry and wet snow avalanches at Makunosawa valley in Myoko, Japan
1
2003
... 除常规的观测雪崩事件外,地基光学遥感最适合进行滑动雪崩和雪檐雪崩的连续观测,并对这两类雪崩进行预测预警.此外,利用地基光学传感器还可以独立或者与地震和次声传感器相结合进行雪崩前锋速度的观测[48-49],在某些雪崩模型的实地验证中,地基光学测量常被用来测量雪崩云的高度[50]. ...
Comparison of simulated powder snow avalanches with photogrammetric measurements
1
2016
... 除常规的观测雪崩事件外,地基光学遥感最适合进行滑动雪崩和雪檐雪崩的连续观测,并对这两类雪崩进行预测预警.此外,利用地基光学传感器还可以独立或者与地震和次声传感器相结合进行雪崩前锋速度的观测[48-49],在某些雪崩模型的实地验证中,地基光学测量常被用来测量雪崩云的高度[50]. ...
Forecasting wet-snow avalanche probability in mountainous terrain
1
2015
... 所有的雪崩遥感观测都可以观测雪崩的发生.在湿雪雪崩发生后,无论是形成区和堆积区都与周边的反照率有不同程度的差异,在某些重要的雪崩沟槽或坡面,也可采用延时相机记录湿雪雪崩的发生事件[51],并通过研究雪崩与气象因子之间的对应关系预测雪崩. ...
Relating meteorological parameters to glide-snow avalanche activity
2
2016
... 当前地基光学遥感还用于对滑动雪崩(glide avalanche)和雪檐雪崩(cornice)的监测,延时可见光相机可以连续监测滑动雪崩[52]、雪檐雪崩(conice或snowbank)[53].将照相机固定在有利的观测点上,将连续拍摄的影像做成动画,可以直观地观测滑动雪崩张性裂隙的扩展和雪檐雪崩中雪堤的生长,利用观测结果可以研究两类雪崩的发生机理,并进行预测预警.Munroe[53]、van Herwijnen等[47]和Vogel等[54]分别利用不同型号的延时相机观测了东南阿拉斯加和挪威斯瓦尔巴德的雪檐雪崩,在Munroe[53]的研究中,他用延时相机图像揭示了犹他州雪檐增长主要与风吹雪有关,并将19个雪檐雪崩按机理分为两类:一类是降雪风吹雪引起的雪檐载荷的增加;另一类是温度快速升高导致的雪檐强度的降低.van Herwijnen等[47]和Vogel等[54]的研究发现雪檐雪崩由降雪和风吹雪形成,但雪崩发生的时机和当时的气象条件关系并不大,强降雪后的强风只对小规模的雪檐雪崩有指示作用,而大规模的雪檐雪崩与雪檐产生裂隙的时机有关,一般发生在裂隙产生的4~5周内,雪崩的规模只与雪檐裂解的雪体体积有关. ...
... 由于滑动雪崩在形成机理上存在较大差异,Dreier等[52]在前人工作的基础上将滑动雪崩划分为冷雪崩和暖雪崩两种形式分别建立两者的气象因子预测指标,发现冷雪崩暴发与最低气温和新降雪量有关,而暖雪崩与气温、雪面温度(雪面长波辐射)以及雪层厚度的减小有关. ...
Monitoring snowbank processes and cornice fall avalanches with time-lapse photography
3
2018
... 当前地基光学遥感还用于对滑动雪崩(glide avalanche)和雪檐雪崩(cornice)的监测,延时可见光相机可以连续监测滑动雪崩[52]、雪檐雪崩(conice或snowbank)[53].将照相机固定在有利的观测点上,将连续拍摄的影像做成动画,可以直观地观测滑动雪崩张性裂隙的扩展和雪檐雪崩中雪堤的生长,利用观测结果可以研究两类雪崩的发生机理,并进行预测预警.Munroe[53]、van Herwijnen等[47]和Vogel等[54]分别利用不同型号的延时相机观测了东南阿拉斯加和挪威斯瓦尔巴德的雪檐雪崩,在Munroe[53]的研究中,他用延时相机图像揭示了犹他州雪檐增长主要与风吹雪有关,并将19个雪檐雪崩按机理分为两类:一类是降雪风吹雪引起的雪檐载荷的增加;另一类是温度快速升高导致的雪檐强度的降低.van Herwijnen等[47]和Vogel等[54]的研究发现雪檐雪崩由降雪和风吹雪形成,但雪崩发生的时机和当时的气象条件关系并不大,强降雪后的强风只对小规模的雪檐雪崩有指示作用,而大规模的雪檐雪崩与雪檐产生裂隙的时机有关,一般发生在裂隙产生的4~5周内,雪崩的规模只与雪檐裂解的雪体体积有关. ...
... [53]、van Herwijnen等[47]和Vogel等[54]分别利用不同型号的延时相机观测了东南阿拉斯加和挪威斯瓦尔巴德的雪檐雪崩,在Munroe[53]的研究中,他用延时相机图像揭示了犹他州雪檐增长主要与风吹雪有关,并将19个雪檐雪崩按机理分为两类:一类是降雪风吹雪引起的雪檐载荷的增加;另一类是温度快速升高导致的雪檐强度的降低.van Herwijnen等[47]和Vogel等[54]的研究发现雪檐雪崩由降雪和风吹雪形成,但雪崩发生的时机和当时的气象条件关系并不大,强降雪后的强风只对小规模的雪檐雪崩有指示作用,而大规模的雪檐雪崩与雪檐产生裂隙的时机有关,一般发生在裂隙产生的4~5周内,雪崩的规模只与雪檐裂解的雪体体积有关. ...
... [53]的研究中,他用延时相机图像揭示了犹他州雪檐增长主要与风吹雪有关,并将19个雪檐雪崩按机理分为两类:一类是降雪风吹雪引起的雪檐载荷的增加;另一类是温度快速升高导致的雪檐强度的降低.van Herwijnen等[47]和Vogel等[54]的研究发现雪檐雪崩由降雪和风吹雪形成,但雪崩发生的时机和当时的气象条件关系并不大,强降雪后的强风只对小规模的雪檐雪崩有指示作用,而大规模的雪檐雪崩与雪檐产生裂隙的时机有关,一般发生在裂隙产生的4~5周内,雪崩的规模只与雪檐裂解的雪体体积有关. ...
Cornice dynamics and meteorological control at Gruvefjellet, Central Svalbard
2
2012
... 当前地基光学遥感还用于对滑动雪崩(glide avalanche)和雪檐雪崩(cornice)的监测,延时可见光相机可以连续监测滑动雪崩[52]、雪檐雪崩(conice或snowbank)[53].将照相机固定在有利的观测点上,将连续拍摄的影像做成动画,可以直观地观测滑动雪崩张性裂隙的扩展和雪檐雪崩中雪堤的生长,利用观测结果可以研究两类雪崩的发生机理,并进行预测预警.Munroe[53]、van Herwijnen等[47]和Vogel等[54]分别利用不同型号的延时相机观测了东南阿拉斯加和挪威斯瓦尔巴德的雪檐雪崩,在Munroe[53]的研究中,他用延时相机图像揭示了犹他州雪檐增长主要与风吹雪有关,并将19个雪檐雪崩按机理分为两类:一类是降雪风吹雪引起的雪檐载荷的增加;另一类是温度快速升高导致的雪檐强度的降低.van Herwijnen等[47]和Vogel等[54]的研究发现雪檐雪崩由降雪和风吹雪形成,但雪崩发生的时机和当时的气象条件关系并不大,强降雪后的强风只对小规模的雪檐雪崩有指示作用,而大规模的雪檐雪崩与雪檐产生裂隙的时机有关,一般发生在裂隙产生的4~5周内,雪崩的规模只与雪檐裂解的雪体体积有关. ...
... [54]的研究发现雪檐雪崩由降雪和风吹雪形成,但雪崩发生的时机和当时的气象条件关系并不大,强降雪后的强风只对小规模的雪檐雪崩有指示作用,而大规模的雪檐雪崩与雪檐产生裂隙的时机有关,一般发生在裂隙产生的4~5周内,雪崩的规模只与雪檐裂解的雪体体积有关. ...
Time-lapse photography as an approach to understanding glide avalanche activity
1
2012
... Hendrikx等[55]、Feick等[56]和van Herwijnen等[57]分别利用延时相机记录了美国蒙大拿冰川国家公园和瑞士达沃斯阿尔卑斯山东部的滑动雪崩,通过统计影像中滑动雪崩后壁张裂隙(tensile crack of avalanche crown)的像元数变化来监测滑动雪崩,并尝试计算雪崩暴发前的气象因子与滑动雪崩之间的关联性来建立滑动雪崩的预测预警指标,其结果都不甚理想.但滑动雪崩暴发前张裂隙有一定的变化规律,如大多数滑动雪崩都在张裂隙出现的3日内暴发,4日后暴发的概率会明显减小[56],滑动雪崩暴发前张裂隙一般都会加速增大. ...
Automated detection and monitoring of glide-snow events using satellite based optical remote sensing and terrestrial photography
2
2012
... Hendrikx等[55]、Feick等[56]和van Herwijnen等[57]分别利用延时相机记录了美国蒙大拿冰川国家公园和瑞士达沃斯阿尔卑斯山东部的滑动雪崩,通过统计影像中滑动雪崩后壁张裂隙(tensile crack of avalanche crown)的像元数变化来监测滑动雪崩,并尝试计算雪崩暴发前的气象因子与滑动雪崩之间的关联性来建立滑动雪崩的预测预警指标,其结果都不甚理想.但滑动雪崩暴发前张裂隙有一定的变化规律,如大多数滑动雪崩都在张裂隙出现的3日内暴发,4日后暴发的概率会明显减小[56],滑动雪崩暴发前张裂隙一般都会加速增大. ...
... [56],滑动雪崩暴发前张裂隙一般都会加速增大. ...
Monitoring glide avalanches using time-lapse
1
2012
... Hendrikx等[55]、Feick等[56]和van Herwijnen等[57]分别利用延时相机记录了美国蒙大拿冰川国家公园和瑞士达沃斯阿尔卑斯山东部的滑动雪崩,通过统计影像中滑动雪崩后壁张裂隙(tensile crack of avalanche crown)的像元数变化来监测滑动雪崩,并尝试计算雪崩暴发前的气象因子与滑动雪崩之间的关联性来建立滑动雪崩的预测预警指标,其结果都不甚理想.但滑动雪崩暴发前张裂隙有一定的变化规律,如大多数滑动雪崩都在张裂隙出现的3日内暴发,4日后暴发的概率会明显减小[56],滑动雪崩暴发前张裂隙一般都会加速增大. ...
Applications of unmanned aerial vehicles in cryosphere: latest advances and prospects
1
2020
... 近年来,由于无人机技术的蓬勃发展,无人机光学遥感也被广泛应用于灾害监测[58].LiDAR扫描仪以及雷达传感器价格较为昂贵,无人机发生事故损失较大,所以无人机搭载光学和近红外波段的自动相机是一种比较经济的选择[59].无人机的光学遥感监测在保证地面分辨率的基础上,可以观测定点监测无法观测的死角,受地面遮蔽物的影响比定点监测小,还可以克服卫星观测重访周期的影响,在某些可能的雪崩临界时间点可以对雪崩释放区进行加密观测.SfM作为一种便捷的摄影测量方法,可以很好地与无人机结合进行三维建模,在雪崩堆积监测中得到很好的应用.Eckerstorfer等[59]利用无人机搭载袖珍数码相机在挪威北部Breivikeidet河谷进行了摄影测量,每秒拍照一次并保证图像的重叠,获取了雪崩堆积的高分辨率正射栅格影像,并确定了雪崩堆积的边界,计算了雪崩堆积的体积. ...
Using “structure-from-motion” photogrammetry in mapping snow avalanche debris
2
2015
... 近年来,由于无人机技术的蓬勃发展,无人机光学遥感也被广泛应用于灾害监测[58].LiDAR扫描仪以及雷达传感器价格较为昂贵,无人机发生事故损失较大,所以无人机搭载光学和近红外波段的自动相机是一种比较经济的选择[59].无人机的光学遥感监测在保证地面分辨率的基础上,可以观测定点监测无法观测的死角,受地面遮蔽物的影响比定点监测小,还可以克服卫星观测重访周期的影响,在某些可能的雪崩临界时间点可以对雪崩释放区进行加密观测.SfM作为一种便捷的摄影测量方法,可以很好地与无人机结合进行三维建模,在雪崩堆积监测中得到很好的应用.Eckerstorfer等[59]利用无人机搭载袖珍数码相机在挪威北部Breivikeidet河谷进行了摄影测量,每秒拍照一次并保证图像的重叠,获取了雪崩堆积的高分辨率正射栅格影像,并确定了雪崩堆积的边界,计算了雪崩堆积的体积. ...
... [59]利用无人机搭载袖珍数码相机在挪威北部Breivikeidet河谷进行了摄影测量,每秒拍照一次并保证图像的重叠,获取了雪崩堆积的高分辨率正射栅格影像,并确定了雪崩堆积的边界,计算了雪崩堆积的体积. ...
Review of spatial variability of snowpack properties and its importance for avalanche formation
1
2008
... 积雪深度是雪体观测中最重要的积雪参数之一,积雪深度的增加不但直接增加雪体沿坡面向下的分力,还可以影响各雪层的密度、硬度以及各雪层的胶结程度进而影响雪崩的暴发及成灾状况[60-61],在实际雪崩研究中积雪深度是经常应用的积雪参数,如早期的研究中,积雪深度阈值被当作预测新雪和雪檐雪崩暴发的指标[6].Veitinger等[62]的研究发现,雪崩形成区的积雪释放面积及雪崩规模与堆积区的积雪深度密切相关.Bocchiola等[63]利用72小时积雪深度一种指标在瑞士阿尔卑斯山区进行了雪崩风险制图.因此,积雪深度监测是积雪和雪崩监测最重要的内容之一. ...
Snow avalanche formation
1
2003
... 积雪深度是雪体观测中最重要的积雪参数之一,积雪深度的增加不但直接增加雪体沿坡面向下的分力,还可以影响各雪层的密度、硬度以及各雪层的胶结程度进而影响雪崩的暴发及成灾状况[60-61],在实际雪崩研究中积雪深度是经常应用的积雪参数,如早期的研究中,积雪深度阈值被当作预测新雪和雪檐雪崩暴发的指标[6].Veitinger等[62]的研究发现,雪崩形成区的积雪释放面积及雪崩规模与堆积区的积雪深度密切相关.Bocchiola等[63]利用72小时积雪深度一种指标在瑞士阿尔卑斯山区进行了雪崩风险制图.因此,积雪深度监测是积雪和雪崩监测最重要的内容之一. ...
Linking snow depth to avalanche release area size: measurements from the Vallée de la Sionne field site
3
2016
... 积雪深度是雪体观测中最重要的积雪参数之一,积雪深度的增加不但直接增加雪体沿坡面向下的分力,还可以影响各雪层的密度、硬度以及各雪层的胶结程度进而影响雪崩的暴发及成灾状况[60-61],在实际雪崩研究中积雪深度是经常应用的积雪参数,如早期的研究中,积雪深度阈值被当作预测新雪和雪檐雪崩暴发的指标[6].Veitinger等[62]的研究发现,雪崩形成区的积雪释放面积及雪崩规模与堆积区的积雪深度密切相关.Bocchiola等[63]利用72小时积雪深度一种指标在瑞士阿尔卑斯山区进行了雪崩风险制图.因此,积雪深度监测是积雪和雪崩监测最重要的内容之一. ...
... 在当前的雪崩危险性和风险评估中,LiDAR也发挥着重要的作用.每次雪崩发生时雪崩形成区中的释放区通常都不尽相同,危险性分析中释放区通常通过分析高分辨率DEM(一般大于10 m)的坡度、朝向、起伏度和曲率来确定[46,62],LiDAR测量的高分辨率和高精度的雪深资料可以极大地提高雪崩释放区识别和雪崩风险评估的准确性,并被广泛应用到偏远地区的雪崩风险制图中[3,74].冬季积雪能通过填洼改变地形的表面特征,不同的冬季地表特征对随后的雪崩运动特征有显著影响,积雪模型中的干摩擦系数和库伦摩擦系数的选取对模型模拟的结果有很大影响,LiDAR获取的冬季积雪深度对这两种摩擦系数的确定有非常重要的参考价值.当前在获取雪崩释放区DEM时,飞机或无人机搭载的LiDAR传感器已逐渐取代了传统的摄影测量. ...
... 2000年Vallet等[81]首先使用Optech ALTM 1020激光扫描仪以直升机为平台监测了瑞士Vallée de la Sionne站的雪崩堆积,精度20~30 cm.Chrustek等[82-83]利用DA42飞机搭载的Riegl LMS-Q560获取的高密度点云建立了波兰Tatra山脉雪崩潜在释放区的DEM和RAMMS(Rapid Mass Movement Simulation)运动模型,并分别以1 m和25 m空间分辨率的DEM模拟了重大雪崩事件的雪崩释放量,发现两种分辨率模拟的雪崩释放量相差7%.Bühler等[84]在瑞士达沃斯Tschuggen和奥地利Lizum地区探索了以无人机为平台搭载LiDAR进行三维重建以及制作高分辨率DSM的可行性,发现无人机LiDAR测量以及近红外波段技术在雪崩制图方面具有较大的潜力.Sovilla等[85]利用直升机搭载Riegl LMS‐Q240i沿雪崩路径测量了瑞士Vallée de la Sionne雪崩站雪崩堆积的厚度,垂直分辨率和水平分辨率分别达到了100 mm和500 mm,揭示雪崩堆积厚度和坡度存在显著的反相关关系.Veitinger等[62]利用相同的仪器在同一地点研究了积雪深度对地表粗糙度的影响,发现积雪深度能显著改变地表形态,较大的积雪深度能增加积雪释放区的面积和雪崩的规模. ...
Regional evaluation of three day snow depth for avalanche hazard mapping in Switzerland
1
2008
... 积雪深度是雪体观测中最重要的积雪参数之一,积雪深度的增加不但直接增加雪体沿坡面向下的分力,还可以影响各雪层的密度、硬度以及各雪层的胶结程度进而影响雪崩的暴发及成灾状况[60-61],在实际雪崩研究中积雪深度是经常应用的积雪参数,如早期的研究中,积雪深度阈值被当作预测新雪和雪檐雪崩暴发的指标[6].Veitinger等[62]的研究发现,雪崩形成区的积雪释放面积及雪崩规模与堆积区的积雪深度密切相关.Bocchiola等[63]利用72小时积雪深度一种指标在瑞士阿尔卑斯山区进行了雪崩风险制图.因此,积雪深度监测是积雪和雪崩监测最重要的内容之一. ...
Mapping snow depth in alpine terrain with unmanned aerial systems (UASs): potential and limitations
1
2016
... Bühler等[64]采用Sony NEX-7相机拍摄系统在瑞士达沃斯附近两个地点进行了多旋翼无人机积雪深度的遥感监测,建立了DSM模型,与定点LiDAR测量结果比较精确度相差不大,标准差介于0.07~0.15 m之间.De Michele等[65]利用固定翼无人机测量了意大利伦巴第大区Val Grosina河谷的积雪深度并与12个定点观测数据进行了对比,发现遥感数据定点观测的积雪深度的平均差值为7.3 cm,标准误差0.143 m,观测数据的方差与像元的大小有关.Adams等[66]在奥地利北Tyrol的阿尔卑斯山地利用架设在固定翼无人机上的Sony NEX5R自动相机观测了这一地区的积雪深度,获取了不同时段可见光和近红外波段的雪深资料,并利用SfM三维建模,获取了这一地区的数字表面模型(DSM)和积雪深度,发现在照度较好的条件之下,两者的精度分别≤0.25 m和≤0.29 m,均在1σ范围;而在照度较差的条件之下,近红外的精度要明显好于可见光. ...
Using a fixed-wing UAS to map snow depth distribution: an evaluation at peak accumulation
1
2016
... Bühler等[64]采用Sony NEX-7相机拍摄系统在瑞士达沃斯附近两个地点进行了多旋翼无人机积雪深度的遥感监测,建立了DSM模型,与定点LiDAR测量结果比较精确度相差不大,标准差介于0.07~0.15 m之间.De Michele等[65]利用固定翼无人机测量了意大利伦巴第大区Val Grosina河谷的积雪深度并与12个定点观测数据进行了对比,发现遥感数据定点观测的积雪深度的平均差值为7.3 cm,标准误差0.143 m,观测数据的方差与像元的大小有关.Adams等[66]在奥地利北Tyrol的阿尔卑斯山地利用架设在固定翼无人机上的Sony NEX5R自动相机观测了这一地区的积雪深度,获取了不同时段可见光和近红外波段的雪深资料,并利用SfM三维建模,获取了这一地区的数字表面模型(DSM)和积雪深度,发现在照度较好的条件之下,两者的精度分别≤0.25 m和≤0.29 m,均在1σ范围;而在照度较差的条件之下,近红外的精度要明显好于可见光. ...
Multitemporal accuracy and precision assessment of unmanned aerial system photogrammetry for slope-scale snow depth maps in alpine terrain
2
2018
... Bühler等[64]采用Sony NEX-7相机拍摄系统在瑞士达沃斯附近两个地点进行了多旋翼无人机积雪深度的遥感监测,建立了DSM模型,与定点LiDAR测量结果比较精确度相差不大,标准差介于0.07~0.15 m之间.De Michele等[65]利用固定翼无人机测量了意大利伦巴第大区Val Grosina河谷的积雪深度并与12个定点观测数据进行了对比,发现遥感数据定点观测的积雪深度的平均差值为7.3 cm,标准误差0.143 m,观测数据的方差与像元的大小有关.Adams等[66]在奥地利北Tyrol的阿尔卑斯山地利用架设在固定翼无人机上的Sony NEX5R自动相机观测了这一地区的积雪深度,获取了不同时段可见光和近红外波段的雪深资料,并利用SfM三维建模,获取了这一地区的数字表面模型(DSM)和积雪深度,发现在照度较好的条件之下,两者的精度分别≤0.25 m和≤0.29 m,均在1σ范围;而在照度较差的条件之下,近红外的精度要明显好于可见光. ...
... 地基LiDAR遥感监测最主要的特点是精度高,已经成为当前积雪深度遥感监测最常用的手段[66],它可以获取高精度连续性的雪深资料,适合对暴发频繁且危险度高的雪崩坡面或沟槽进行重点连续观测.但其缺点也很突出,比如观测区域相对较小而且TLS仪器重量较大,这也意味着TLS只适合观测容易到达区域的雪崩,而且操作技术含量高,需要有一定工作经验的专业人士来完成,观测工作比较费时费力.另外,LiDAR较高的价格一直是其大规模使用的限制因素. ...
Snow depth mapping in high-alpine catchments using digital photogrammetry
1
2015
... 航空光学遥感的最显著优点是能快速获取高分辨率的地面影像,还可以利用SfM建立DSM模型,而且具有较高的精度,Bühler等[67]的研究表明,航空光学遥感的精度大约为30 cm的标准误差,覆盖范围大约几个平方千米,分辨率随飞行高度而变化,大约在5~50 cm之间波动.接收的辐射包括5个波段,最重要的是近红外波段,该波段不易饱和,是建模的主要波段,这个波段对积雪的粒径大小比较敏感,图像的对比度也要优于RGB影像.在图像中地物充分暴露的前提下,均匀的雪崩堆积很容易与周边环境区分,高分辨率的全色影像的判读即使非专业人士也可以完成.在较大空间范围内自动分类技术可以轻松判别大中型雪崩.航空雪崩遥感最主要的缺点是受天气影响很大,在恶劣天气下,飞机无法正常作业,另外航空遥感也非常重视时效性,如果不能及时对雪崩进行观测,雪崩堆积很容易被新雪掩盖而影响判读效果.有人驾驶飞机的航空遥感一般成本较高,所以当下无人机得到了广泛应用,但无人机的操作需要一定的培训,而且在某些国家或地区无人机的使用受到一定的限制. ...
Automated avalanche mapping from SPOT 6/7 satellite imagery with deep learning: results, evaluation, potential and limitations
1
2022
... 航天光学遥感在监测滑坡和地震等自然灾害中应用比较广泛,但利用卫星搭载光学传感器来监测雪崩的研究还比较少.航天光学遥感监测雪崩的基本机理是雪崩暴发前后雪崩的形成区、流通区、堆积区的表面反射率呈现出不同程度的差异,而这些差异可以很直观地从光学影像中得到识别.雪崩三个基本形态分区与未受扰动的积雪表面的反射率也会出现明显的不同,其中以堆积区的变化最为显著,这主要与雪崩后雪崩堆积密度和含水量的增加有关,另外雪崩运动因携带固体物质,如碎屑或者植被,也会造成堆积区表面污化和表面粗糙度变化.相对于星载SAR只能测量中等以上规模的雪崩,卫星重访期长,且影像不直观等局限外,星载的光学遥感也具有自身的优势.Hafner等[68]利用深度学习和神经网络算法对SPOT 6/7影像的雪崩堆积进行识别,取得了很好的分类效果.Larsen等[69]和Lato等[17]利用快鸟卫星的光学影像对挪威西部的雪崩进行了判别研究,他们发现在照明过度以及高纬度地区太阳高度角较小时容易形成曝光不足的区域,人工识别雪崩堆积几乎不可能实现,但合适的自动判别算法可以提高阴影区和过度照明的雪崩判别成功率. ...
Automatic avalanche mapping using texture classification of optical satellite imagery
1
2020
... 航天光学遥感在监测滑坡和地震等自然灾害中应用比较广泛,但利用卫星搭载光学传感器来监测雪崩的研究还比较少.航天光学遥感监测雪崩的基本机理是雪崩暴发前后雪崩的形成区、流通区、堆积区的表面反射率呈现出不同程度的差异,而这些差异可以很直观地从光学影像中得到识别.雪崩三个基本形态分区与未受扰动的积雪表面的反射率也会出现明显的不同,其中以堆积区的变化最为显著,这主要与雪崩后雪崩堆积密度和含水量的增加有关,另外雪崩运动因携带固体物质,如碎屑或者植被,也会造成堆积区表面污化和表面粗糙度变化.相对于星载SAR只能测量中等以上规模的雪崩,卫星重访期长,且影像不直观等局限外,星载的光学遥感也具有自身的优势.Hafner等[68]利用深度学习和神经网络算法对SPOT 6/7影像的雪崩堆积进行识别,取得了很好的分类效果.Larsen等[69]和Lato等[17]利用快鸟卫星的光学影像对挪威西部的雪崩进行了判别研究,他们发现在照明过度以及高纬度地区太阳高度角较小时容易形成曝光不足的区域,人工识别雪崩堆积几乎不可能实现,但合适的自动判别算法可以提高阴影区和过度照明的雪崩判别成功率. ...
Manual detection of snow avalanche debris using high-resolution Radarsat-2 SAR images
3
2015
... Eckerstorfer等[70]在挪威北部利用Landsat-8全色影像人工判读了大型雪崩堆积,分辨率15 m,并以此作为Radar判读雪崩堆积的标准.Bühler等[20]利用SPOT6和SPOT7影像以及图像增强技术人工判读瑞士12 500 km2范围内包括过度照明以及阴影区18 737条雪崩堆积,与其后的直升机获取的照片进行对照,发现可以利用高分辨率的光学卫星影像对某个雪崩周期内大范围的雪崩活动进行监测,高分辨卫星获取的雪崩活动信息具有可靠性、完备性和准确性. ...
... 雪崩发生后对散射变化影响最大的是雪面的含水量和粗糙度[91].其中,雪崩的释放区粗糙度变化最小,流通区次之,而堆积区最大.因此,堆积区的后向散射相比于雪崩前出现了显著的突然增加,因而堆积区也成为雪崩雷达遥感监测最为关注的区域.Eckerstorfer等[70]在挪威北部Troms县利用Radarsat-2雷达资料对比了546条雪崩发生前后堆积物的后向散射,统计发现两者差的中值增加了3.7 dB,雪崩堆积从中心向周边500 m的缓冲区内雪崩前后其后向散射大约相差1.5 dB.雪崩堆积相比于雪崩前堆积区域的雪量、密度、含水量、表面粗糙度都有了显著的增加,这些因素都促成了后向散射的增加. ...
... Wiesmann等[102]最先使用C波段的欧洲ERS1/2雷达进行雪崩观测,发现舌状雪崩堆积的后向散射与周边积雪存在明显差异.Malnes等[103]利用C波段的Radarsat-2 Ultrafine Mode (RS-2U)雷达影像对挪威北部的灾害性雪崩进行了监测,该雷达数据空间分辨率30 m×30 m,幅宽20 km,当雪崩堆积与周围积雪后向散射的差值在1.5~2.3 dB时,雪崩堆积可以用肉眼进行分辨.Eckerstorfer等[70,104]利用12景2014年3月的RS-2U雷达影像对挪威北部Troms县雪崩进行了判读,在读取的546个可能的雪崩堆积中,剔除了顶底倒置、重复读取以及雷达阴影外,获取了467个雪崩的影像,其中37%的雪崩得到了实地或者光学遥感影像的验证.RS-2U雷达影像观测精度较高,但12景影像仅能覆盖Troms县12%的范围.2014年发射的哨兵-1号(Sentinel-1)卫星作为一种免费的雷达遥感卫星被广泛地应用到雪崩的监测中,哨兵-1号包括2014年发射的哨兵-1A和2016年发射的哨兵-1B,幅宽一般250 km,分辨率20 m×5 m,采用VV和VH极化方式,重访期一般12 d,作为极地卫星,极地的重访期可缩短至2~3 d(表2).一景哨兵-1A(Sentinel-1A)图像即可以覆盖整个Troms县,其面积大约250 km×250 km,水平分辨率约20 m.Malnes等[105]首次将哨兵卫星用于雪崩的监测,他观测了挪威北部Troms县的中等及以上规模的雪崩(雪崩规模分级见表3),其中升轨505个,降轨404个.对比雪崩堆积与周边雪面的微波后向散射变化,雪崩堆积与未受扰动的积雪相比,雪崩堆积表面粗糙度更大,后向散射相应也更大.雪崩堆积在形态上呈舌状向下延伸,其形态很容易与周边环境区分开来.Vickers等[106]引入自动算法大大减少了人工判读的工作量,利用植被地图掩膜排除植被水体,利用>35°坡度掩膜排除较大坡度像元,再排除雪崩前后散射差值<6 dB的像元后,可以识别60%的雪崩堆积.Eckerstorfer等[107]利用多轨道的哨兵-1号卫星资料以及Vickers的算法[108]自动监测了挪威北部2016—2018年150 km×100 km的雪崩活动,经过验证发现最高准确率可以达到82%.2019年Eckerstorfer等[109]利用哨兵-1号卫星资料,在改进算法的基础上,对挪威北部的雪崩进行了自动监测,并对监测到的其中57%的雪崩进行实地验证,发现哨兵-1号监测的准确率达到了79%. ...
Mapping snow avalanche debris by object-based classification in mountainous regions from Sentinel-1 images and causative indices
5
2021
... 高分辨率光学遥感图像识别雪崩的优点是技术相对比较成熟,错误率低.这类影像有很多种,其中快鸟卫星图像分辨率高且可以用于商业用途的影像,它包括一个全色波段和4个多光谱波段,全色波段分辨率0.6 m,多光谱波段分辨率2.5 m,重访周期1~3.5天,幅宽16.5~19 km,这些参数可以满足雪崩风险制图的需求.2016年我国发射的高景1号全色波段分辨率可达0.5 m,在某些无法到达的区域可以用来检验雷达雪崩遥感监测的准确性[71].从2013年开始,Landsat-8提供了免费的高分辨率卫星影像,全色通道分辨率15 m,影像视场100 km×100 km.星载光学遥感的一个重要缺陷是影像无法聚焦在待研究的区域,而且观测的时机难以准确把握.2015年以后Sentinel-2(哨兵-2号)系列卫星逐渐投入使用,Sentinel-2携带可见光、近红外和短波红外传感器,包括13个波段,分辨率分别为10 m、20 m和60 m,影像视场范围290 km×290 km.近年来全球发射了大量低轨道、低价格、高分辨率的光学遥感卫星,使得雪崩的光学遥感监测越来越可信.光学遥感图像识别的缺点是,光学遥感依然受遥感方法、雪崩沟槽坡度朝向、阴影、恶劣天气以及过度照明等问题的限制.另外,风改造过的雪面和积雪覆盖植被后可能呈现出与雪崩堆积相似的纹理特征,从而影响光学影像识别的准确率.如果雪崩堆积被新雪覆盖,也会减小光学遥感识别的概率. ...
... 近年来随着卫星及摄影科技的发展,很多宽幅高分辨率的光学传感器投入到了监测灾害,如蓝鸟(0.6 m)、worldView-1/2(0.5 m)、Kompsat2/3(0.7 m)、Plelades(0.7 m)、GeoEye-1(0.5 m),以及我国研发的高景卫星(SuperView-1/2),这些卫星的分辨率都是亚米级的.Liu等[71]利用哨兵-1号雷达资料研究新疆巩乃斯的雪崩堆积时就利用高景1号卫星影像对监测结果进行了验证.如果把雷达和光学传感器组合起来形成一个组合传感器,不但可以使雪崩观测记录更加连续,还可以克服雷达影像出现的顶底倒置以及透视收缩等问题. ...
... 以上算法都是基于后向散射单一指标来确定某些区域是否发生雪崩.最新的研究进展是在充分考虑像元后向散射的基础上,还应考虑雪崩堆积的纹理和形状,以及地形、地表植被等对雪崩识别的影响[71,116].Liu等[71]基于多极化哨兵-1号影像,首先使用H-α分解技术以及SVM和逻辑回归方法对新疆天山山脉的雪崩堆积进行了非监督分类,分类中除后向散射外,还分析了地形和植被参数对分类结果的影响,该方法克服了VV/HH采用固定阈值的缺点[106,117],取得了较好监测结果.Bianchi等[116]将地形及植被作为影响因子利用全卷积神经网络技术(fully convolutional network)对挪威北部6 345条已经人工识别的雪崩进行训练和验证,其识别准确性的F1得分可以达到0.66. ...
... [71]基于多极化哨兵-1号影像,首先使用H-α分解技术以及SVM和逻辑回归方法对新疆天山山脉的雪崩堆积进行了非监督分类,分类中除后向散射外,还分析了地形和植被参数对分类结果的影响,该方法克服了VV/HH采用固定阈值的缺点[106,117],取得了较好监测结果.Bianchi等[116]将地形及植被作为影响因子利用全卷积神经网络技术(fully convolutional network)对挪威北部6 345条已经人工识别的雪崩进行训练和验证,其识别准确性的F1得分可以达到0.66. ...
... 首先,自动算法分类结果的优劣依赖于专家分析,特别是那些地形复杂、人员无法到达的区域,而作为“金标准”的专家分析结果的准确性无法得到验证;其次,新雪崩堆积叠加在老雪崩堆积体之上时,新的雪崩事件无法确认;第三,风对雪面的侵蚀或风吹雪堆积会造成“相同地物出现不同频谱”或“相同频谱对应不同地物”的情形,影响影像分类结果[71];第四,星载传感器受重访期影响,对中低纬度地区雪崩无法做到近实时监测;第五,湿雪雪崩向干雪雪崩转型时,雪崩堆积识别的准确率低;第六,中小规模的雪崩无法通过影像进行识别,使得遥感监测的雪崩数量远小于实际的雪崩数量.这些问题也是SAR雪崩自动监测研究以后需要改进的方向. ...
Mapping starting zone snow depth with a ground-based lidar to assist avalanche control and forecasting
4
2015
... LiDAR是一种主动激光遥感,其基本原理是激光扫描器发射近红外波段的激光脉冲,激光脉冲到达地面受雪面反射后被扫描器的光电二极管接收,利用脉冲信号往返所用的时间可以确定扫描仪与地面的距离.脉冲信号的数据以点云的方式被记录在扫描仪的内置坐标系中,通过配准等参数处理方法可以将扫描仪内置坐标系的数据转换成全球坐标系下的地表高程.以飞机或无人机平台的LiDAR,利用激光脉冲测量目标的距离,还需要通过定位系统,如GNSS卫星定位系统(Global Navigation Satellite System),将目标地物转换为具有位置及高程的空间坐标信息的点云[72],将有雪时地表的高程数据与无雪时的高程数据进行对照,可以获取厘米尺度的高分辨率积雪深度数据. ...
... Prokop等[75]首先将LiDAR架设在地面用于雪崩监测(图1),他发现在晴朗的天气下,500 m范围内TLS监测雪深的标准差不超过10 cm.Prokop等[75-76]的三个松雪雪崩案例研究表明,TLS能监测到形成区雪体的释放和堆积区体积的增加,并可对雪崩的物质平衡进行研究.Deems等[72]在科罗拉多的Arapahoe盆地进行了类似的研究,利用TLS观测了无雪和有雪覆盖的雪崩沟槽形成区积雪损失量、雪崩释放时流通区雪深变化以及雪崩后堆积区雪崩堆积高度变化,计算了雪崩堆积量.Prokop等[77]结合TLS观测、延时相机、积雪定点观测以及实地的雪坑资料,对法国阿尔卑斯山Col du Lautaret雪崩站的雪崩发生动力学进行了研究,发现TLS观测对于研究雪崩机理有重要的参考价值,并为雪崩的动力学模型的建立提供了一种重要的生长参数,雪崩堆积体积与雪崩形成区释放和流通区携带体积之和的比值为1∶1.87. ...
... [
72]:无雪时利用Riegl VZ-4000绘制大比例尺地图(a);主要参数图示(b)
注:R为目标距离;γ为激光束发散角;θ为垂直可观测角范围;ψ为可观测水平角范围. ...
... TLS在雪檐雪崩的观测方面发挥着重要作用.积雪深度与积雪密度、硬度关系密切,在积雪达到临界深度时,雪檐就有可能释放[72].雪檐雪崩与风吹雪以及特殊地形下的最大积雪深度有着非常重要的联系.迎风坡风力增大时会出现雪檐加速形成的现象,而TLS观测的高分辨率积雪深度为研究最大积雪深度的空间分布提供重要手段.Fey等[78]在奥地利的Weisssee观测点研究了TLS观测资料的可靠性,并与自动气象站的雪深实际观测对照,发现均值相差仅0.03 m,均方差0.02~0.1 m,说明TLS观测的积雪深度是可靠的.Hancock等[79]利用Riegl VZ-6000观测了挪威Svalbard地区2015年12月和2017年2月两次灾害性雪崩发生前后积雪厚度的分布状况,探究了这一地区大雪崩的发生与东风以及强降雪之间的关联性,指出特定大气环流形势下的降雪以及风速风向对积雪的再分配是形成灾害性雪崩的最主要原因,在这些情形之下自动气象站记录的积雪深度不能反映积雪的实际状况,而TLS记录的坡面的积雪深度及其时空变化却能反映真实的积雪分布状况.Hancock等[80]还利用TLS研究了中斯瓦尔巴德地区雪檐雪崩发生的动力学过程,通过对比2016—2018年的雪檐雪崩发生记录与TLS观测雪檐雪厚度变化,他发现暴风雪引起的雪檐的增长速率可以达到10 mm·h-1,6次雪檐雪崩中5次雪崩暴发是由于雪檐的快速增长导致,仅有1次是冬季温度升高时期的降雨所致. ...
Remote sensing based retrieval of snow cover properties
1
2008
... LiDAR具有分辨率高、抗干扰能力强的优点,可以架设在视野开阔的固定观测点或搭载在飞行器上,来获取雪崩形成区到堆积区精确的积雪深度资料[73],结合摄影测量可以为雪崩动力学建模及雪崩物质平衡研究提供重要参数. ...
Automated snow avalanche release area delineation in data-sparse, remote, and forested regions
1
2022
... 在当前的雪崩危险性和风险评估中,LiDAR也发挥着重要的作用.每次雪崩发生时雪崩形成区中的释放区通常都不尽相同,危险性分析中释放区通常通过分析高分辨率DEM(一般大于10 m)的坡度、朝向、起伏度和曲率来确定[46,62],LiDAR测量的高分辨率和高精度的雪深资料可以极大地提高雪崩释放区识别和雪崩风险评估的准确性,并被广泛应用到偏远地区的雪崩风险制图中[3,74].冬季积雪能通过填洼改变地形的表面特征,不同的冬季地表特征对随后的雪崩运动特征有显著影响,积雪模型中的干摩擦系数和库伦摩擦系数的选取对模型模拟的结果有很大影响,LiDAR获取的冬季积雪深度对这两种摩擦系数的确定有非常重要的参考价值.当前在获取雪崩释放区DEM时,飞机或无人机搭载的LiDAR传感器已逐渐取代了传统的摄影测量. ...
A comparison of measurement methods: terrestrial laser scanning, tachymetry and snow probing for the determination of the spatial snow-depth distribution on slopes
2
2008
... Prokop等[75]首先将LiDAR架设在地面用于雪崩监测(图1),他发现在晴朗的天气下,500 m范围内TLS监测雪深的标准差不超过10 cm.Prokop等[75-76]的三个松雪雪崩案例研究表明,TLS能监测到形成区雪体的释放和堆积区体积的增加,并可对雪崩的物质平衡进行研究.Deems等[72]在科罗拉多的Arapahoe盆地进行了类似的研究,利用TLS观测了无雪和有雪覆盖的雪崩沟槽形成区积雪损失量、雪崩释放时流通区雪深变化以及雪崩后堆积区雪崩堆积高度变化,计算了雪崩堆积量.Prokop等[77]结合TLS观测、延时相机、积雪定点观测以及实地的雪坑资料,对法国阿尔卑斯山Col du Lautaret雪崩站的雪崩发生动力学进行了研究,发现TLS观测对于研究雪崩机理有重要的参考价值,并为雪崩的动力学模型的建立提供了一种重要的生长参数,雪崩堆积体积与雪崩形成区释放和流通区携带体积之和的比值为1∶1.87. ...
... [75-76]的三个松雪雪崩案例研究表明,TLS能监测到形成区雪体的释放和堆积区体积的增加,并可对雪崩的物质平衡进行研究.Deems等[72]在科罗拉多的Arapahoe盆地进行了类似的研究,利用TLS观测了无雪和有雪覆盖的雪崩沟槽形成区积雪损失量、雪崩释放时流通区雪深变化以及雪崩后堆积区雪崩堆积高度变化,计算了雪崩堆积量.Prokop等[77]结合TLS观测、延时相机、积雪定点观测以及实地的雪坑资料,对法国阿尔卑斯山Col du Lautaret雪崩站的雪崩发生动力学进行了研究,发现TLS观测对于研究雪崩机理有重要的参考价值,并为雪崩的动力学模型的建立提供了一种重要的生长参数,雪崩堆积体积与雪崩形成区释放和流通区携带体积之和的比值为1∶1.87. ...
Determining avalanche modelling input parameters using terrestrial laser scanning technology
1
... Prokop等[75]首先将LiDAR架设在地面用于雪崩监测(图1),他发现在晴朗的天气下,500 m范围内TLS监测雪深的标准差不超过10 cm.Prokop等[75-76]的三个松雪雪崩案例研究表明,TLS能监测到形成区雪体的释放和堆积区体积的增加,并可对雪崩的物质平衡进行研究.Deems等[72]在科罗拉多的Arapahoe盆地进行了类似的研究,利用TLS观测了无雪和有雪覆盖的雪崩沟槽形成区积雪损失量、雪崩释放时流通区雪深变化以及雪崩后堆积区雪崩堆积高度变化,计算了雪崩堆积量.Prokop等[77]结合TLS观测、延时相机、积雪定点观测以及实地的雪坑资料,对法国阿尔卑斯山Col du Lautaret雪崩站的雪崩发生动力学进行了研究,发现TLS观测对于研究雪崩机理有重要的参考价值,并为雪崩的动力学模型的建立提供了一种重要的生长参数,雪崩堆积体积与雪崩形成区释放和流通区携带体积之和的比值为1∶1.87. ...
Merging terrestrial laser scanning technology with photogrammetric and total station data for the determination of avalanche modeling parameters
1
2015
... Prokop等[75]首先将LiDAR架设在地面用于雪崩监测(图1),他发现在晴朗的天气下,500 m范围内TLS监测雪深的标准差不超过10 cm.Prokop等[75-76]的三个松雪雪崩案例研究表明,TLS能监测到形成区雪体的释放和堆积区体积的增加,并可对雪崩的物质平衡进行研究.Deems等[72]在科罗拉多的Arapahoe盆地进行了类似的研究,利用TLS观测了无雪和有雪覆盖的雪崩沟槽形成区积雪损失量、雪崩释放时流通区雪深变化以及雪崩后堆积区雪崩堆积高度变化,计算了雪崩堆积量.Prokop等[77]结合TLS观测、延时相机、积雪定点观测以及实地的雪坑资料,对法国阿尔卑斯山Col du Lautaret雪崩站的雪崩发生动力学进行了研究,发现TLS观测对于研究雪崩机理有重要的参考价值,并为雪崩的动力学模型的建立提供了一种重要的生长参数,雪崩堆积体积与雪崩形成区释放和流通区携带体积之和的比值为1∶1.87. ...
A compilation of multitemporal TLS snow depth distribution maps at the Weisssee snow research site (Kaunertal, Austria)
1
2019
... TLS在雪檐雪崩的观测方面发挥着重要作用.积雪深度与积雪密度、硬度关系密切,在积雪达到临界深度时,雪檐就有可能释放[72].雪檐雪崩与风吹雪以及特殊地形下的最大积雪深度有着非常重要的联系.迎风坡风力增大时会出现雪檐加速形成的现象,而TLS观测的高分辨率积雪深度为研究最大积雪深度的空间分布提供重要手段.Fey等[78]在奥地利的Weisssee观测点研究了TLS观测资料的可靠性,并与自动气象站的雪深实际观测对照,发现均值相差仅0.03 m,均方差0.02~0.1 m,说明TLS观测的积雪深度是可靠的.Hancock等[79]利用Riegl VZ-6000观测了挪威Svalbard地区2015年12月和2017年2月两次灾害性雪崩发生前后积雪厚度的分布状况,探究了这一地区大雪崩的发生与东风以及强降雪之间的关联性,指出特定大气环流形势下的降雪以及风速风向对积雪的再分配是形成灾害性雪崩的最主要原因,在这些情形之下自动气象站记录的积雪深度不能反映积雪的实际状况,而TLS记录的坡面的积雪深度及其时空变化却能反映真实的积雪分布状况.Hancock等[80]还利用TLS研究了中斯瓦尔巴德地区雪檐雪崩发生的动力学过程,通过对比2016—2018年的雪檐雪崩发生记录与TLS观测雪檐雪厚度变化,他发现暴风雪引起的雪檐的增长速率可以达到10 mm·h-1,6次雪檐雪崩中5次雪崩暴发是由于雪檐的快速增长导致,仅有1次是冬季温度升高时期的降雨所致. ...
Combining high spatial resolution snow mapping and meteorological analyses to improve forecasting of destructive avalanches in Longyearbyen, Svalbard
1
2018
... TLS在雪檐雪崩的观测方面发挥着重要作用.积雪深度与积雪密度、硬度关系密切,在积雪达到临界深度时,雪檐就有可能释放[72].雪檐雪崩与风吹雪以及特殊地形下的最大积雪深度有着非常重要的联系.迎风坡风力增大时会出现雪檐加速形成的现象,而TLS观测的高分辨率积雪深度为研究最大积雪深度的空间分布提供重要手段.Fey等[78]在奥地利的Weisssee观测点研究了TLS观测资料的可靠性,并与自动气象站的雪深实际观测对照,发现均值相差仅0.03 m,均方差0.02~0.1 m,说明TLS观测的积雪深度是可靠的.Hancock等[79]利用Riegl VZ-6000观测了挪威Svalbard地区2015年12月和2017年2月两次灾害性雪崩发生前后积雪厚度的分布状况,探究了这一地区大雪崩的发生与东风以及强降雪之间的关联性,指出特定大气环流形势下的降雪以及风速风向对积雪的再分配是形成灾害性雪崩的最主要原因,在这些情形之下自动气象站记录的积雪深度不能反映积雪的实际状况,而TLS记录的坡面的积雪深度及其时空变化却能反映真实的积雪分布状况.Hancock等[80]还利用TLS研究了中斯瓦尔巴德地区雪檐雪崩发生的动力学过程,通过对比2016—2018年的雪檐雪崩发生记录与TLS观测雪檐雪厚度变化,他发现暴风雪引起的雪檐的增长速率可以达到10 mm·h-1,6次雪檐雪崩中5次雪崩暴发是由于雪檐的快速增长导致,仅有1次是冬季温度升高时期的降雨所致. ...
Quantifying seasonal cornice dynamics using a terrestrial laser scanner in Svalbard, Norway
1
2020
... TLS在雪檐雪崩的观测方面发挥着重要作用.积雪深度与积雪密度、硬度关系密切,在积雪达到临界深度时,雪檐就有可能释放[72].雪檐雪崩与风吹雪以及特殊地形下的最大积雪深度有着非常重要的联系.迎风坡风力增大时会出现雪檐加速形成的现象,而TLS观测的高分辨率积雪深度为研究最大积雪深度的空间分布提供重要手段.Fey等[78]在奥地利的Weisssee观测点研究了TLS观测资料的可靠性,并与自动气象站的雪深实际观测对照,发现均值相差仅0.03 m,均方差0.02~0.1 m,说明TLS观测的积雪深度是可靠的.Hancock等[79]利用Riegl VZ-6000观测了挪威Svalbard地区2015年12月和2017年2月两次灾害性雪崩发生前后积雪厚度的分布状况,探究了这一地区大雪崩的发生与东风以及强降雪之间的关联性,指出特定大气环流形势下的降雪以及风速风向对积雪的再分配是形成灾害性雪崩的最主要原因,在这些情形之下自动气象站记录的积雪深度不能反映积雪的实际状况,而TLS记录的坡面的积雪深度及其时空变化却能反映真实的积雪分布状况.Hancock等[80]还利用TLS研究了中斯瓦尔巴德地区雪檐雪崩发生的动力学过程,通过对比2016—2018年的雪檐雪崩发生记录与TLS观测雪檐雪厚度变化,他发现暴风雪引起的雪檐的增长速率可以达到10 mm·h-1,6次雪檐雪崩中5次雪崩暴发是由于雪檐的快速增长导致,仅有1次是冬季温度升高时期的降雨所致. ...
Development of a helicopter-based integrated system for avalanche mapping and hazard management
1
2000
... 2000年Vallet等[81]首先使用Optech ALTM 1020激光扫描仪以直升机为平台监测了瑞士Vallée de la Sionne站的雪崩堆积,精度20~30 cm.Chrustek等[82-83]利用DA42飞机搭载的Riegl LMS-Q560获取的高密度点云建立了波兰Tatra山脉雪崩潜在释放区的DEM和RAMMS(Rapid Mass Movement Simulation)运动模型,并分别以1 m和25 m空间分辨率的DEM模拟了重大雪崩事件的雪崩释放量,发现两种分辨率模拟的雪崩释放量相差7%.Bühler等[84]在瑞士达沃斯Tschuggen和奥地利Lizum地区探索了以无人机为平台搭载LiDAR进行三维重建以及制作高分辨率DSM的可行性,发现无人机LiDAR测量以及近红外波段技术在雪崩制图方面具有较大的潜力.Sovilla等[85]利用直升机搭载Riegl LMS‐Q240i沿雪崩路径测量了瑞士Vallée de la Sionne雪崩站雪崩堆积的厚度,垂直分辨率和水平分辨率分别达到了100 mm和500 mm,揭示雪崩堆积厚度和坡度存在显著的反相关关系.Veitinger等[62]利用相同的仪器在同一地点研究了积雪深度对地表粗糙度的影响,发现积雪深度能显著改变地表形态,较大的积雪深度能增加积雪释放区的面积和雪崩的规模. ...
Using high resolution LiDAR data for snow avalanche hazard mapping
1
2013
... 2000年Vallet等[81]首先使用Optech ALTM 1020激光扫描仪以直升机为平台监测了瑞士Vallée de la Sionne站的雪崩堆积,精度20~30 cm.Chrustek等[82-83]利用DA42飞机搭载的Riegl LMS-Q560获取的高密度点云建立了波兰Tatra山脉雪崩潜在释放区的DEM和RAMMS(Rapid Mass Movement Simulation)运动模型,并分别以1 m和25 m空间分辨率的DEM模拟了重大雪崩事件的雪崩释放量,发现两种分辨率模拟的雪崩释放量相差7%.Bühler等[84]在瑞士达沃斯Tschuggen和奥地利Lizum地区探索了以无人机为平台搭载LiDAR进行三维重建以及制作高分辨率DSM的可行性,发现无人机LiDAR测量以及近红外波段技术在雪崩制图方面具有较大的潜力.Sovilla等[85]利用直升机搭载Riegl LMS‐Q240i沿雪崩路径测量了瑞士Vallée de la Sionne雪崩站雪崩堆积的厚度,垂直分辨率和水平分辨率分别达到了100 mm和500 mm,揭示雪崩堆积厚度和坡度存在显著的反相关关系.Veitinger等[62]利用相同的仪器在同一地点研究了积雪深度对地表粗糙度的影响,发现积雪深度能显著改变地表形态,较大的积雪深度能增加积雪释放区的面积和雪崩的规模. ...
Using high resolution LiDAR data to estimate potential avalanche release areas on the example of Polish Mountain regions
1
2009
... 2000年Vallet等[81]首先使用Optech ALTM 1020激光扫描仪以直升机为平台监测了瑞士Vallée de la Sionne站的雪崩堆积,精度20~30 cm.Chrustek等[82-83]利用DA42飞机搭载的Riegl LMS-Q560获取的高密度点云建立了波兰Tatra山脉雪崩潜在释放区的DEM和RAMMS(Rapid Mass Movement Simulation)运动模型,并分别以1 m和25 m空间分辨率的DEM模拟了重大雪崩事件的雪崩释放量,发现两种分辨率模拟的雪崩释放量相差7%.Bühler等[84]在瑞士达沃斯Tschuggen和奥地利Lizum地区探索了以无人机为平台搭载LiDAR进行三维重建以及制作高分辨率DSM的可行性,发现无人机LiDAR测量以及近红外波段技术在雪崩制图方面具有较大的潜力.Sovilla等[85]利用直升机搭载Riegl LMS‐Q240i沿雪崩路径测量了瑞士Vallée de la Sionne雪崩站雪崩堆积的厚度,垂直分辨率和水平分辨率分别达到了100 mm和500 mm,揭示雪崩堆积厚度和坡度存在显著的反相关关系.Veitinger等[62]利用相同的仪器在同一地点研究了积雪深度对地表粗糙度的影响,发现积雪深度能显著改变地表形态,较大的积雪深度能增加积雪释放区的面积和雪崩的规模. ...
Photogrammetric reconstruction of homogenous snow surfaces in alpine terrain applying near-infrared UAS imagery
1
2017
... 2000年Vallet等[81]首先使用Optech ALTM 1020激光扫描仪以直升机为平台监测了瑞士Vallée de la Sionne站的雪崩堆积,精度20~30 cm.Chrustek等[82-83]利用DA42飞机搭载的Riegl LMS-Q560获取的高密度点云建立了波兰Tatra山脉雪崩潜在释放区的DEM和RAMMS(Rapid Mass Movement Simulation)运动模型,并分别以1 m和25 m空间分辨率的DEM模拟了重大雪崩事件的雪崩释放量,发现两种分辨率模拟的雪崩释放量相差7%.Bühler等[84]在瑞士达沃斯Tschuggen和奥地利Lizum地区探索了以无人机为平台搭载LiDAR进行三维重建以及制作高分辨率DSM的可行性,发现无人机LiDAR测量以及近红外波段技术在雪崩制图方面具有较大的潜力.Sovilla等[85]利用直升机搭载Riegl LMS‐Q240i沿雪崩路径测量了瑞士Vallée de la Sionne雪崩站雪崩堆积的厚度,垂直分辨率和水平分辨率分别达到了100 mm和500 mm,揭示雪崩堆积厚度和坡度存在显著的反相关关系.Veitinger等[62]利用相同的仪器在同一地点研究了积雪深度对地表粗糙度的影响,发现积雪深度能显著改变地表形态,较大的积雪深度能增加积雪释放区的面积和雪崩的规模. ...
Variation of deposition depth with slope angle in snow avalanches: measurements from Vallée de la Sionne
1
2010
... 2000年Vallet等[81]首先使用Optech ALTM 1020激光扫描仪以直升机为平台监测了瑞士Vallée de la Sionne站的雪崩堆积,精度20~30 cm.Chrustek等[82-83]利用DA42飞机搭载的Riegl LMS-Q560获取的高密度点云建立了波兰Tatra山脉雪崩潜在释放区的DEM和RAMMS(Rapid Mass Movement Simulation)运动模型,并分别以1 m和25 m空间分辨率的DEM模拟了重大雪崩事件的雪崩释放量,发现两种分辨率模拟的雪崩释放量相差7%.Bühler等[84]在瑞士达沃斯Tschuggen和奥地利Lizum地区探索了以无人机为平台搭载LiDAR进行三维重建以及制作高分辨率DSM的可行性,发现无人机LiDAR测量以及近红外波段技术在雪崩制图方面具有较大的潜力.Sovilla等[85]利用直升机搭载Riegl LMS‐Q240i沿雪崩路径测量了瑞士Vallée de la Sionne雪崩站雪崩堆积的厚度,垂直分辨率和水平分辨率分别达到了100 mm和500 mm,揭示雪崩堆积厚度和坡度存在显著的反相关关系.Veitinger等[62]利用相同的仪器在同一地点研究了积雪深度对地表粗糙度的影响,发现积雪深度能显著改变地表形态,较大的积雪深度能增加积雪释放区的面积和雪崩的规模. ...
The airborne snow observatory: fusion of scanning lidar, imaging spectrometer, and physically-based modeling for mapping snow water equivalent and snow albedo
2
2016
... 航空LiDAR最适合监测积雪深度.相比TLS,ALS可以观测的区域更加灵活,不会出现监测死角.但当前利用ALS对雪崩的研究还很少,其高昂的价格和使用技术依然是其广泛应用的限制因素.NASA2016年开展了航空积雪观测项目(Airborne Snow Observatory或ASO,Painter,2016)[86],主要目的是利用机载的LiDAR和成像光谱仪通过研究积雪深度、水当量和积雪反照率,来揭示积雪的性质和分布,从而为水资源管理服务,其监测的准确性可以得到保证[87-89].如Currier在该项目研究中对比了ALS和TLS的积雪深度观测,在1 m分辨率的影像中,两者的中值相差5 cm,标准差(σALS-σTLS)相差3 cm,两者最大差值出现在对灌木下垫面积雪的观测中,ALS的入射角比TLS的入射角要小,ALS观测的积雪深度比TLS要大10 cm左右,说明ALS在实地的观测中是可信的[90]. ...
... [86],主要目的是利用机载的LiDAR和成像光谱仪通过研究积雪深度、水当量和积雪反照率,来揭示积雪的性质和分布,从而为水资源管理服务,其监测的准确性可以得到保证[87-89].如Currier在该项目研究中对比了ALS和TLS的积雪深度观测,在1 m分辨率的影像中,两者的中值相差5 cm,标准差(σALS-σTLS)相差3 cm,两者最大差值出现在对灌木下垫面积雪的观测中,ALS的入射角比TLS的入射角要小,ALS观测的积雪深度比TLS要大10 cm左右,说明ALS在实地的观测中是可信的[90]. ...
Snow depth mapping from stereo satellite imagery in mountainous terrain: evaluation using airborne laser-scanning data
1
2020
... 航空LiDAR最适合监测积雪深度.相比TLS,ALS可以观测的区域更加灵活,不会出现监测死角.但当前利用ALS对雪崩的研究还很少,其高昂的价格和使用技术依然是其广泛应用的限制因素.NASA2016年开展了航空积雪观测项目(Airborne Snow Observatory或ASO,Painter,2016)[86],主要目的是利用机载的LiDAR和成像光谱仪通过研究积雪深度、水当量和积雪反照率,来揭示积雪的性质和分布,从而为水资源管理服务,其监测的准确性可以得到保证[87-89].如Currier在该项目研究中对比了ALS和TLS的积雪深度观测,在1 m分辨率的影像中,两者的中值相差5 cm,标准差(σALS-σTLS)相差3 cm,两者最大差值出现在对灌木下垫面积雪的观测中,ALS的入射角比TLS的入射角要小,ALS观测的积雪深度比TLS要大10 cm左右,说明ALS在实地的观测中是可信的[90]. ...
Mapping snow depth and volume at the alpine watershed scale from aerial imagery using structure from motion
0
2021
Assessing the ability of structure from motion to map high-resolution snow surface elevations in complex terrain: a case study from senator beck basin, CO
1
2019
... 航空LiDAR最适合监测积雪深度.相比TLS,ALS可以观测的区域更加灵活,不会出现监测死角.但当前利用ALS对雪崩的研究还很少,其高昂的价格和使用技术依然是其广泛应用的限制因素.NASA2016年开展了航空积雪观测项目(Airborne Snow Observatory或ASO,Painter,2016)[86],主要目的是利用机载的LiDAR和成像光谱仪通过研究积雪深度、水当量和积雪反照率,来揭示积雪的性质和分布,从而为水资源管理服务,其监测的准确性可以得到保证[87-89].如Currier在该项目研究中对比了ALS和TLS的积雪深度观测,在1 m分辨率的影像中,两者的中值相差5 cm,标准差(σALS-σTLS)相差3 cm,两者最大差值出现在对灌木下垫面积雪的观测中,ALS的入射角比TLS的入射角要小,ALS观测的积雪深度比TLS要大10 cm左右,说明ALS在实地的观测中是可信的[90]. ...
Comparing aerial lidar observations with terrestrial lidar and snow-probe transects from NASA’s 2017 SnowEx campaign
1
2019
... 航空LiDAR最适合监测积雪深度.相比TLS,ALS可以观测的区域更加灵活,不会出现监测死角.但当前利用ALS对雪崩的研究还很少,其高昂的价格和使用技术依然是其广泛应用的限制因素.NASA2016年开展了航空积雪观测项目(Airborne Snow Observatory或ASO,Painter,2016)[86],主要目的是利用机载的LiDAR和成像光谱仪通过研究积雪深度、水当量和积雪反照率,来揭示积雪的性质和分布,从而为水资源管理服务,其监测的准确性可以得到保证[87-89].如Currier在该项目研究中对比了ALS和TLS的积雪深度观测,在1 m分辨率的影像中,两者的中值相差5 cm,标准差(σALS-σTLS)相差3 cm,两者最大差值出现在对灌木下垫面积雪的观测中,ALS的入射角比TLS的入射角要小,ALS观测的积雪深度比TLS要大10 cm左右,说明ALS在实地的观测中是可信的[90]. ...
Snow avalanche detection and mapping in multitemporal and multiorbital radar images from TerraSAR-X and Sentinel-1
5
2020
... 雪崩发生后对散射变化影响最大的是雪面的含水量和粗糙度[91].其中,雪崩的释放区粗糙度变化最小,流通区次之,而堆积区最大.因此,堆积区的后向散射相比于雪崩前出现了显著的突然增加,因而堆积区也成为雪崩雷达遥感监测最为关注的区域.Eckerstorfer等[70]在挪威北部Troms县利用Radarsat-2雷达资料对比了546条雪崩发生前后堆积物的后向散射,统计发现两者差的中值增加了3.7 dB,雪崩堆积从中心向周边500 m的缓冲区内雪崩前后其后向散射大约相差1.5 dB.雪崩堆积相比于雪崩前堆积区域的雪量、密度、含水量、表面粗糙度都有了显著的增加,这些因素都促成了后向散射的增加. ...
... Leinss等[91]利用TerraSAR-X(TSX)雷达遥感资料对瑞士中部的雪崩进行监测,TerraSAR-X是德国航天中心(German Aerospace Center)研发的一款雷达卫星,属X波段(9.6 GHz),重访期11天,单视复数影像的分辨率可达2.3 m×3.3 m,将多轨的哨兵-1号与单轨的TerraSAR-X进行对照,发现两种雷达卫星监测的雪崩信息非常一致,并用光学遥感的SPOT-6进行检验,发现在雪崩高发的2018年1月4日共有7 361条新发雪崩. ...
... 利用卫星雷达监测雪崩的最大优点是不受光照和天气因素的影响,可以进行全天候监测.缺点是容易受到地形影响,也会受到卫星重访周期的影响,对雪崩周期(avalanche cycle)内雪崩高发时段灾害的发生无法进行加密观测,在雪崩堆积被新降湿雪覆盖时其后向散射无法与周围环境的后向散射进行区分,造成雪崩记录的遗漏,而且监测费用比较昂贵.一个经过地理编码的高分辨率SAR影像,如RS-2U,熟练的观测人员可以分辨出较小规模的雪崩.但较小雷达入射角形成影像的顶底倒置和透视收缩往往会影响雪崩判读的结果.2014年后的哨兵-1号雷达影像可以在网上免费下载,但其分辨率较低,使得哨兵-1号仅能准确监测到4级和5级的大型和超大型雪崩,对1级和2级雪崩无法判别,对三级雪崩仅能监测50%左右(表3)[91].利用自动算法可以减少雪崩雷达监测的工作量,但对比雪崩前后散射变化时,不同时段参考影像的选取会大大影响自动监测的准确率,选取不同的掩膜可能会导致像元在K均值聚类时混淆雪崩堆积与其他地物[108],这也说明仅依靠后向散射一项指标监测雪崩会存在较大误差. ...
... 遥感观测方面,根据藏东南地形高差大、降雪量大以及多湿雪雪崩的特点,拟以RS-2U影像为主要监测传感器进行监测,并以哨兵-1号雷达影像、快鸟或高景-1光学影像进行结果的检验和验证.其具体操作步骤按Wesselink等[117]的方法执行.首先是数据前处理,包括各种影像数据的下载、投影坐标系的转换、2×2像素平滑消除斑纹、图像转换成GeoTIFF格式等.第二步,利用掩膜将<5°和>55°的不可能发生雪崩堆积的地形排除;5°和55°这两个阈值的选取符合雪崩的运动规律,McClung等[6,94]将雪崩形成区始发点和雪崩堆积区最远点的连线与水平线的夹角定义为α[94],他发现百年一遇的大雪崩α在15°~50°之间波动,在这个角度之外几乎很少有雪崩活动.根据Johnston等[128]和Delparte等[129]的统计,大多数雪崩的α值介于20°~40°之间.流通区平均坡度介于30°~15°之间,因为雪崩的动能未能全部耗散,冲击力较大,不会有较大粒径的砾石停留,也不会有树龄长的乔木生长.树龄较长的树木一般都出现在堆积区的远端,这些树木因为受到雪崩的冲击产生树木年轮的异常生长或者疤痕,从而成为历史大雪崩定年的证据[130].第三步,利用超宽带测绘带模式(S-1A extra-wide swath mode,S-1A EW)的哨兵-1A影像或者RADARSAT-2的超精细模式(RS-2 ultrafine mode)生成RGB图像.S-1A EW的特点是覆盖范围大、重访期短,其中红色和蓝色通道为无雪崩活动的参考图像,绿色通道为有雪崩图像,在合成图上,绿色一般为雪崩堆积.第四步,雪崩堆积的人工识别,雪崩堆积在雷达影像上一般呈绿色舌状,并向下延伸,在高分辨率的RS-2U图像上很容易辨识,通过对已发生雪崩堆积的判读,可以建立雪崩堆积后向散射的一组阈值,并制作阈值直方图.为了保证阈值的准确,在判读雪崩影像时一般由两名雪崩研究专业人员共同完成.滤波时阈值选取有固定阈值和动态阈值两种方式,Wesselink等[117]采用3 db、Karbou等[131]、Leinss等[91]采用4 db、Vicker等[106]采用6 db的固定值,发现参考影像为湿雪时分类结果不好.在参考影像为干雪时,雪崩暴发前的气象状况也会对雪崩堆积的分类产生影响[132].为了提高分类的准确性,Tompkin等[1]考虑了局地亮度对后向散射的影响,在计算后向散射时进行了局地分辨率权重的多视处理,采用了1.91 db的阈值进行分类,使得召回率和准确率都有了显著的提高.Eckerstorfer等[114]采用动态阈值,即后向散射μ+1.5SD和μ+2.5SD两种阈值,发现高阈值(2.5SD)的K均值聚类的分类效果更好.取值过高,有些雪崩堆积有可能没有被统计在内;取值过低,有些不是雪崩堆积的区域可能被统计进来.第五步,对无雪崩发生的参考图像和有雪崩发生的图像进行5×5像素中值滤波以消除斑纹.第六步,以雪崩活动的后向散射影像减去无雪崩活动的参考影像生成后向散射变化影像.第七步,生成雷达入射角度、顶底倒置以及雷达阴影等不可能发生雪崩的掩膜,以剔除部分地形影响.第八步,对监测影像使用各种掩膜及散射变化阈值,生成雪崩和无雪崩的二元像素分类.第九步,使用去除小斑块RSO滤波器(Remove Small Objects filter),根据影像分辨率,滤除确定雪崩堆积边界的不规则像元.第十步,采用自适应滤波将具有相同性质的像元连接起来,生成雪崩和无雪崩的二元影像图(图6). ...
... 星载雷达影像在获取雪崩信息后,一般还需要进行检验,测试雷达影像监测雪崩的准确度以及错误率等参数.在可到达的区域可以采用人工直接进行检验,而在人员无法到达的区域,可直接借用其他雷达影像如哨兵-1号进行检验,或者利用高分辨率的光学影像进行检验,如Bühler等[20]、Leinss等[91]采用SPOT6/7光学影像观测的雪崩活动作为标准来检验雷达影像的准确性,而Lato等[17]则利用快鸟影像作为无法直接观测地区雪崩发生的标准.SPOT6/7全色和多光谱的分辨率分别为1.5 m和6 m,而快鸟则分别达到了0.6 m和2.4 m. ...
Advancements for snowmelt monitoring by means of sentinel-1 SAR
1
2016
... 积雪的另一个微波特性体现在相干性特征方面.微波穿透积雪和雪崩堆积时,由于雪层密度、含水量的差异,同轨道SAR监测的雪崩发生前后相位信息会发生改变[92-93].对于没有雪崩堆积覆盖的地表,SAR两次观测的相位是一致的,相干系数会明显高于雪崩堆积,相位信息的变化与否也是雪崩堆积识别的另一个依据. ...
Capability assessment of fully polarimetric ALOS-PALSAR data for discriminating wet snow from other scattering types in mountainous regions
2
2014
... 积雪的另一个微波特性体现在相干性特征方面.微波穿透积雪和雪崩堆积时,由于雪层密度、含水量的差异,同轨道SAR监测的雪崩发生前后相位信息会发生改变[92-93].对于没有雪崩堆积覆盖的地表,SAR两次观测的相位是一致的,相干系数会明显高于雪崩堆积,相位信息的变化与否也是雪崩堆积识别的另一个依据. ...
... 根据藏东南的气象条件,利用星载SAR进行雪崩监测成为首选.因为雪崩发生在气温回升的春季,降雨和雪面融水下渗可能是雪崩活动增加的主要因素.在雪面水分增加时,后向散射由体散射迅速向大气-雪面散射转化,散射值会呈现明显的变化,在雪崩暴发前就可以利用C波段SAR的交叉极化判别危险雪体的干湿变化[93].藏东南的雪崩具有湿雪雪崩的运动及堆积特点,如雪崩运动速度较慢,雪崩运动时常携带大量的固体物质,使得雪崩堆积一般呈暗色甚至黑色,雪崩堆积体表面的粗糙度较大(图3),这些变化都对雪崩的遥感判读非常有利.Wesselink等[117]和Eckerstorfer等[112]的研究表明,后向散射对高密度以及表面粗糙度较大的雪面非常敏感,虽然其中的具体机理还有待进一步的研究.根据Vickers等[108]的研究,散射阈值分类方法在雪崩从干雪向湿雪转化时,雪崩堆积判读的准确率只有50%,而在从干雪向湿雪转化时,判读的准确率可以达到90%,藏东南雪崩周期刚好从干雪向湿雪转化,因而星载SAR非常适合在藏东南进行雪崩监测.在星载雷达中,RS-2U和哨兵-1号是两种重要选项,哨兵-1号是一种免费的雷达影像(表1),但哨兵-1号空间分辨率较低,对一级到三级的小型雪崩无法判别,中型雪崩判读的概率也不高,加之其在中低纬度的重访期为12天,而藏东南春季降雪频率较高、降雪量大,如果雪崩堆积被新降湿雪覆盖以及风吹雪平滑,哨兵-1号重访时可能无法观测到已经发生的雪崩,造成雪崩观测的漏测.RS-2U空间分辨率3 m×3 m,重访期1天,可以满足藏东南雪崩监测的要求. ...
Maximum frontal speeds, alpha angles and deposit volumes of flowing snow avalanches
3
2018
... 雪崩的SAR遥感监测在其风险评估和土地利用规划中发挥着非常重要的作用.与雪崩的动力学模型不同,长期监测积雪最大运动距离、最大前锋运动速度及覆盖范围可以预测某次雪崩到达某个位置的概率,利用统计获取的这种概率密度符合皮尔逊Ⅲ型分布[94],这种极值分布可以为雪崩的工程防治提供相关设计参数. ...
... 遥感观测方面,根据藏东南地形高差大、降雪量大以及多湿雪雪崩的特点,拟以RS-2U影像为主要监测传感器进行监测,并以哨兵-1号雷达影像、快鸟或高景-1光学影像进行结果的检验和验证.其具体操作步骤按Wesselink等[117]的方法执行.首先是数据前处理,包括各种影像数据的下载、投影坐标系的转换、2×2像素平滑消除斑纹、图像转换成GeoTIFF格式等.第二步,利用掩膜将<5°和>55°的不可能发生雪崩堆积的地形排除;5°和55°这两个阈值的选取符合雪崩的运动规律,McClung等[6,94]将雪崩形成区始发点和雪崩堆积区最远点的连线与水平线的夹角定义为α[94],他发现百年一遇的大雪崩α在15°~50°之间波动,在这个角度之外几乎很少有雪崩活动.根据Johnston等[128]和Delparte等[129]的统计,大多数雪崩的α值介于20°~40°之间.流通区平均坡度介于30°~15°之间,因为雪崩的动能未能全部耗散,冲击力较大,不会有较大粒径的砾石停留,也不会有树龄长的乔木生长.树龄较长的树木一般都出现在堆积区的远端,这些树木因为受到雪崩的冲击产生树木年轮的异常生长或者疤痕,从而成为历史大雪崩定年的证据[130].第三步,利用超宽带测绘带模式(S-1A extra-wide swath mode,S-1A EW)的哨兵-1A影像或者RADARSAT-2的超精细模式(RS-2 ultrafine mode)生成RGB图像.S-1A EW的特点是覆盖范围大、重访期短,其中红色和蓝色通道为无雪崩活动的参考图像,绿色通道为有雪崩图像,在合成图上,绿色一般为雪崩堆积.第四步,雪崩堆积的人工识别,雪崩堆积在雷达影像上一般呈绿色舌状,并向下延伸,在高分辨率的RS-2U图像上很容易辨识,通过对已发生雪崩堆积的判读,可以建立雪崩堆积后向散射的一组阈值,并制作阈值直方图.为了保证阈值的准确,在判读雪崩影像时一般由两名雪崩研究专业人员共同完成.滤波时阈值选取有固定阈值和动态阈值两种方式,Wesselink等[117]采用3 db、Karbou等[131]、Leinss等[91]采用4 db、Vicker等[106]采用6 db的固定值,发现参考影像为湿雪时分类结果不好.在参考影像为干雪时,雪崩暴发前的气象状况也会对雪崩堆积的分类产生影响[132].为了提高分类的准确性,Tompkin等[1]考虑了局地亮度对后向散射的影响,在计算后向散射时进行了局地分辨率权重的多视处理,采用了1.91 db的阈值进行分类,使得召回率和准确率都有了显著的提高.Eckerstorfer等[114]采用动态阈值,即后向散射μ+1.5SD和μ+2.5SD两种阈值,发现高阈值(2.5SD)的K均值聚类的分类效果更好.取值过高,有些雪崩堆积有可能没有被统计在内;取值过低,有些不是雪崩堆积的区域可能被统计进来.第五步,对无雪崩发生的参考图像和有雪崩发生的图像进行5×5像素中值滤波以消除斑纹.第六步,以雪崩活动的后向散射影像减去无雪崩活动的参考影像生成后向散射变化影像.第七步,生成雷达入射角度、顶底倒置以及雷达阴影等不可能发生雪崩的掩膜,以剔除部分地形影响.第八步,对监测影像使用各种掩膜及散射变化阈值,生成雪崩和无雪崩的二元像素分类.第九步,使用去除小斑块RSO滤波器(Remove Small Objects filter),根据影像分辨率,滤除确定雪崩堆积边界的不规则像元.第十步,采用自适应滤波将具有相同性质的像元连接起来,生成雪崩和无雪崩的二元影像图(图6). ...
... [94],他发现百年一遇的大雪崩α在15°~50°之间波动,在这个角度之外几乎很少有雪崩活动.根据Johnston等[128]和Delparte等[129]的统计,大多数雪崩的α值介于20°~40°之间.流通区平均坡度介于30°~15°之间,因为雪崩的动能未能全部耗散,冲击力较大,不会有较大粒径的砾石停留,也不会有树龄长的乔木生长.树龄较长的树木一般都出现在堆积区的远端,这些树木因为受到雪崩的冲击产生树木年轮的异常生长或者疤痕,从而成为历史大雪崩定年的证据[130].第三步,利用超宽带测绘带模式(S-1A extra-wide swath mode,S-1A EW)的哨兵-1A影像或者RADARSAT-2的超精细模式(RS-2 ultrafine mode)生成RGB图像.S-1A EW的特点是覆盖范围大、重访期短,其中红色和蓝色通道为无雪崩活动的参考图像,绿色通道为有雪崩图像,在合成图上,绿色一般为雪崩堆积.第四步,雪崩堆积的人工识别,雪崩堆积在雷达影像上一般呈绿色舌状,并向下延伸,在高分辨率的RS-2U图像上很容易辨识,通过对已发生雪崩堆积的判读,可以建立雪崩堆积后向散射的一组阈值,并制作阈值直方图.为了保证阈值的准确,在判读雪崩影像时一般由两名雪崩研究专业人员共同完成.滤波时阈值选取有固定阈值和动态阈值两种方式,Wesselink等[117]采用3 db、Karbou等[131]、Leinss等[91]采用4 db、Vicker等[106]采用6 db的固定值,发现参考影像为湿雪时分类结果不好.在参考影像为干雪时,雪崩暴发前的气象状况也会对雪崩堆积的分类产生影响[132].为了提高分类的准确性,Tompkin等[1]考虑了局地亮度对后向散射的影响,在计算后向散射时进行了局地分辨率权重的多视处理,采用了1.91 db的阈值进行分类,使得召回率和准确率都有了显著的提高.Eckerstorfer等[114]采用动态阈值,即后向散射μ+1.5SD和μ+2.5SD两种阈值,发现高阈值(2.5SD)的K均值聚类的分类效果更好.取值过高,有些雪崩堆积有可能没有被统计在内;取值过低,有些不是雪崩堆积的区域可能被统计进来.第五步,对无雪崩发生的参考图像和有雪崩发生的图像进行5×5像素中值滤波以消除斑纹.第六步,以雪崩活动的后向散射影像减去无雪崩活动的参考影像生成后向散射变化影像.第七步,生成雷达入射角度、顶底倒置以及雷达阴影等不可能发生雪崩的掩膜,以剔除部分地形影响.第八步,对监测影像使用各种掩膜及散射变化阈值,生成雪崩和无雪崩的二元像素分类.第九步,使用去除小斑块RSO滤波器(Remove Small Objects filter),根据影像分辨率,滤除确定雪崩堆积边界的不规则像元.第十步,采用自适应滤波将具有相同性质的像元连接起来,生成雪崩和无雪崩的二元影像图(图6). ...
A complete snow avalanche activity record from a Norwegian forecasting region using Sentinel-1 satellite-radar data
2
2017
... SAR遥感监测还可以对雪崩发生的危险等级进行预测,比如哨兵-1号卫星一般具有12天的重访期,其轨道包含两个升轨和两个降轨,在6天内可以得到4幅影像[95],4幅影像相互间隔大约2天.因为短期内雪崩堆积区面积增加预示着某一区域内雪崩的危险增高,因而可以根据雪崩堆积区面积变化对3级以上中等到大规模雪崩的危险性进行评估. ...
... 对雷达遥感图像来说,雪崩堆积与周围环境影像的后向散射以及相干性会产生明显的差异.Vickers等[106,108]和Eckerstorfer等[95,107,114]给出了利用动态阈值来进行监测的方法.在下载数据经过前期掩膜、地理编码以及地形校正后获得升轨和降轨像对,以500×500像元输入,经过高斯函数差分滤波(difference of Gaussians,DOG)以及K均值聚类方法可以得到雪崩像元的二元近实时监测图.最重要的滤波步骤是对经过垂直极化和交叉极化后雪崩前后的影像相减,求得后向散射差值影像ΔHH和ΔHV,然后进行高斯函数差分滤波(DOG),滤波的目的是增加后向散射的空间变化梯度,增强的后向散射空间梯度更容易确定雪崩堆积的边界.对滤波后的影像根据均值μ和标准差SD选取两个阈值μ+1.5SD和μ+2.5SD,对图像进行差值处理,选取的阈值越高,得到的像元雪崩的可能性越大.分级步骤是对VV和VH两种极化通道获取的图像分成N个等级,计算雪崩发生前后和参考影像等级的差值.然后选取差值的阈值,使得大于阈值的像元为雪崩像元,小于阈值的为无雪崩像元,从而得到雪崩像元分布图.Vickers等[106,108]认为分成6级最为理想,不但可以反映等级的变化,而且其数据计算量适中,可以获取接近实时的雪崩监测图.Eckerstorfer等[114]采用这种方法对挪威北部的雪崩进行了自动监测,最大的准确率达到了85%,错误率24.9%,算法的可靠性较高. ...
Final report: improved alpine avalanche forecast service aaf
1
2014
... SAR影像还可以辅助鉴定雪崩发生的类型.因为后向散射对雪体的含水量比较敏感,所以可通过监测后向散射的变化来反演雪崩是否为湿雪雪崩[96].一般来说,含水量少的粉状雪崩和含水量异常丰富的雪泥(slush)运动距离都比较大,只有含水量中等的潮雪雪崩(moist avalanche)的运动距离最短. ...
Monitoring of dynamic changes in alpine snow with terrestrial radar imagery
1
2014
... Wiesmann等[97]和Caduff等[98]分别在瑞士达沃斯部署GAMMA便携式干涉仪(17.2 GHz,Ku波段)进行了短期滑动雪崩(glide avalanche)的连续监测,每2~3 min获取一帧图像,除可以观测到小型雪崩以外,他们还发现强烈的太阳辐射导致的雪体含水量增加可以显著影响图像的相干性.通过图像解缠,Caduff等[98]获取了视距方向(LOS)积雪的蠕动位移.因为湿雪雪崩、全层滑动雪崩在雪崩释放前雪崩形成区都有比较明显的表面位移,因而Caduff等[99]建议利用地基SAR来监测和预警这两类雪崩的活动状况. ...
Continuous monitoring of snowpack displacement at high spatial and temporal resolution with terrestrial radar interferometry
2
2015
... Wiesmann等[97]和Caduff等[98]分别在瑞士达沃斯部署GAMMA便携式干涉仪(17.2 GHz,Ku波段)进行了短期滑动雪崩(glide avalanche)的连续监测,每2~3 min获取一帧图像,除可以观测到小型雪崩以外,他们还发现强烈的太阳辐射导致的雪体含水量增加可以显著影响图像的相干性.通过图像解缠,Caduff等[98]获取了视距方向(LOS)积雪的蠕动位移.因为湿雪雪崩、全层滑动雪崩在雪崩释放前雪崩形成区都有比较明显的表面位移,因而Caduff等[99]建议利用地基SAR来监测和预警这两类雪崩的活动状况. ...
... [98]获取了视距方向(LOS)积雪的蠕动位移.因为湿雪雪崩、全层滑动雪崩在雪崩释放前雪崩形成区都有比较明显的表面位移,因而Caduff等[99]建议利用地基SAR来监测和预警这两类雪崩的活动状况. ...
Terrestrial radar interferometry for snow glide activity monitoring and its potential as precursor of wet snow avalanches
1
2016
... Wiesmann等[97]和Caduff等[98]分别在瑞士达沃斯部署GAMMA便携式干涉仪(17.2 GHz,Ku波段)进行了短期滑动雪崩(glide avalanche)的连续监测,每2~3 min获取一帧图像,除可以观测到小型雪崩以外,他们还发现强烈的太阳辐射导致的雪体含水量增加可以显著影响图像的相干性.通过图像解缠,Caduff等[98]获取了视距方向(LOS)积雪的蠕动位移.因为湿雪雪崩、全层滑动雪崩在雪崩释放前雪崩形成区都有比较明显的表面位移,因而Caduff等[99]建议利用地基SAR来监测和预警这两类雪崩的活动状况. ...
Drone-mounted ultrawideband radar for retrieval of snowpack properties
2
2020
... NASA开发和利用无人机平台搭载SAR进行雪崩观测,一般采用L波段进行单轨或者重复轨道的InSAR来观测雪崩,无人机飞行高度在2 000~18 000 m之间.由于卫星搭载的SAR具有较长的重访周期,在某些雪崩高发的时段而卫星SAR又不能及时获取地面雪崩信息时,无人机平台搭载的SAR可以作为雪崩监测的有效补充.Jenssen等[100-101]利用无人机搭载超宽带雷达传感器(Ultra Wide Band radar)对雪崩形成区的积雪深度、密度以及层理进行监测,并与现场挖取的雪坑观测进行对照,发现两种方法测量积雪深度的相关系数达到了0.87以上,雷达观测的雪体密度和层理特征与现场雪坑观测也有较好的一致性. ...
... 积雪物理性质变化对雪崩预报的重要性要高于气象因子[6].但绝大多数的雪崩形成区往往不可到达,雪体力学性质往往不能实地观测获取,而无人机平台搭载的SAR可以填补这方面的空白.但到目前为止,无人机搭载SAR进行雪崩监测的研究还很少,快速获取雷达信息的算法也不成熟,雷达发送和接收天线的研究仍然是主要的技术难题[100].另外,无人机搭载SAR进行雪崩监测必须由技术熟练的专业人员来完成. ...
Drone-based uwb radar to measure snow layering in avalanche starting zones
1
2016
... NASA开发和利用无人机平台搭载SAR进行雪崩观测,一般采用L波段进行单轨或者重复轨道的InSAR来观测雪崩,无人机飞行高度在2 000~18 000 m之间.由于卫星搭载的SAR具有较长的重访周期,在某些雪崩高发的时段而卫星SAR又不能及时获取地面雪崩信息时,无人机平台搭载的SAR可以作为雪崩监测的有效补充.Jenssen等[100-101]利用无人机搭载超宽带雷达传感器(Ultra Wide Band radar)对雪崩形成区的积雪深度、密度以及层理进行监测,并与现场挖取的雪坑观测进行对照,发现两种方法测量积雪深度的相关系数达到了0.87以上,雷达观测的雪体密度和层理特征与现场雪坑观测也有较好的一致性. ...
Potential and methodology of satellite based SAR for hazard mapping
1
2002
... Wiesmann等[102]最先使用C波段的欧洲ERS1/2雷达进行雪崩观测,发现舌状雪崩堆积的后向散射与周边积雪存在明显差异.Malnes等[103]利用C波段的Radarsat-2 Ultrafine Mode (RS-2U)雷达影像对挪威北部的灾害性雪崩进行了监测,该雷达数据空间分辨率30 m×30 m,幅宽20 km,当雪崩堆积与周围积雪后向散射的差值在1.5~2.3 dB时,雪崩堆积可以用肉眼进行分辨.Eckerstorfer等[70,104]利用12景2014年3月的RS-2U雷达影像对挪威北部Troms县雪崩进行了判读,在读取的546个可能的雪崩堆积中,剔除了顶底倒置、重复读取以及雷达阴影外,获取了467个雪崩的影像,其中37%的雪崩得到了实地或者光学遥感影像的验证.RS-2U雷达影像观测精度较高,但12景影像仅能覆盖Troms县12%的范围.2014年发射的哨兵-1号(Sentinel-1)卫星作为一种免费的雷达遥感卫星被广泛地应用到雪崩的监测中,哨兵-1号包括2014年发射的哨兵-1A和2016年发射的哨兵-1B,幅宽一般250 km,分辨率20 m×5 m,采用VV和VH极化方式,重访期一般12 d,作为极地卫星,极地的重访期可缩短至2~3 d(表2).一景哨兵-1A(Sentinel-1A)图像即可以覆盖整个Troms县,其面积大约250 km×250 km,水平分辨率约20 m.Malnes等[105]首次将哨兵卫星用于雪崩的监测,他观测了挪威北部Troms县的中等及以上规模的雪崩(雪崩规模分级见表3),其中升轨505个,降轨404个.对比雪崩堆积与周边雪面的微波后向散射变化,雪崩堆积与未受扰动的积雪相比,雪崩堆积表面粗糙度更大,后向散射相应也更大.雪崩堆积在形态上呈舌状向下延伸,其形态很容易与周边环境区分开来.Vickers等[106]引入自动算法大大减少了人工判读的工作量,利用植被地图掩膜排除植被水体,利用>35°坡度掩膜排除较大坡度像元,再排除雪崩前后散射差值<6 dB的像元后,可以识别60%的雪崩堆积.Eckerstorfer等[107]利用多轨道的哨兵-1号卫星资料以及Vickers的算法[108]自动监测了挪威北部2016—2018年150 km×100 km的雪崩活动,经过验证发现最高准确率可以达到82%.2019年Eckerstorfer等[109]利用哨兵-1号卫星资料,在改进算法的基础上,对挪威北部的雪崩进行了自动监测,并对监测到的其中57%的雪崩进行实地验证,发现哨兵-1号监测的准确率达到了79%. ...
Remote sensing of avalanches in Northern Norway using synthetic aperture radar
1
2013
... Wiesmann等[102]最先使用C波段的欧洲ERS1/2雷达进行雪崩观测,发现舌状雪崩堆积的后向散射与周边积雪存在明显差异.Malnes等[103]利用C波段的Radarsat-2 Ultrafine Mode (RS-2U)雷达影像对挪威北部的灾害性雪崩进行了监测,该雷达数据空间分辨率30 m×30 m,幅宽20 km,当雪崩堆积与周围积雪后向散射的差值在1.5~2.3 dB时,雪崩堆积可以用肉眼进行分辨.Eckerstorfer等[70,104]利用12景2014年3月的RS-2U雷达影像对挪威北部Troms县雪崩进行了判读,在读取的546个可能的雪崩堆积中,剔除了顶底倒置、重复读取以及雷达阴影外,获取了467个雪崩的影像,其中37%的雪崩得到了实地或者光学遥感影像的验证.RS-2U雷达影像观测精度较高,但12景影像仅能覆盖Troms县12%的范围.2014年发射的哨兵-1号(Sentinel-1)卫星作为一种免费的雷达遥感卫星被广泛地应用到雪崩的监测中,哨兵-1号包括2014年发射的哨兵-1A和2016年发射的哨兵-1B,幅宽一般250 km,分辨率20 m×5 m,采用VV和VH极化方式,重访期一般12 d,作为极地卫星,极地的重访期可缩短至2~3 d(表2).一景哨兵-1A(Sentinel-1A)图像即可以覆盖整个Troms县,其面积大约250 km×250 km,水平分辨率约20 m.Malnes等[105]首次将哨兵卫星用于雪崩的监测,他观测了挪威北部Troms县的中等及以上规模的雪崩(雪崩规模分级见表3),其中升轨505个,降轨404个.对比雪崩堆积与周边雪面的微波后向散射变化,雪崩堆积与未受扰动的积雪相比,雪崩堆积表面粗糙度更大,后向散射相应也更大.雪崩堆积在形态上呈舌状向下延伸,其形态很容易与周边环境区分开来.Vickers等[106]引入自动算法大大减少了人工判读的工作量,利用植被地图掩膜排除植被水体,利用>35°坡度掩膜排除较大坡度像元,再排除雪崩前后散射差值<6 dB的像元后,可以识别60%的雪崩堆积.Eckerstorfer等[107]利用多轨道的哨兵-1号卫星资料以及Vickers的算法[108]自动监测了挪威北部2016—2018年150 km×100 km的雪崩活动,经过验证发现最高准确率可以达到82%.2019年Eckerstorfer等[109]利用哨兵-1号卫星资料,在改进算法的基础上,对挪威北部的雪崩进行了自动监测,并对监测到的其中57%的雪崩进行实地验证,发现哨兵-1号监测的准确率达到了79%. ...
Avalanche debris detection using satellite- and drone based radar and optical remote sensing
2
2014
... Wiesmann等[102]最先使用C波段的欧洲ERS1/2雷达进行雪崩观测,发现舌状雪崩堆积的后向散射与周边积雪存在明显差异.Malnes等[103]利用C波段的Radarsat-2 Ultrafine Mode (RS-2U)雷达影像对挪威北部的灾害性雪崩进行了监测,该雷达数据空间分辨率30 m×30 m,幅宽20 km,当雪崩堆积与周围积雪后向散射的差值在1.5~2.3 dB时,雪崩堆积可以用肉眼进行分辨.Eckerstorfer等[70,104]利用12景2014年3月的RS-2U雷达影像对挪威北部Troms县雪崩进行了判读,在读取的546个可能的雪崩堆积中,剔除了顶底倒置、重复读取以及雷达阴影外,获取了467个雪崩的影像,其中37%的雪崩得到了实地或者光学遥感影像的验证.RS-2U雷达影像观测精度较高,但12景影像仅能覆盖Troms县12%的范围.2014年发射的哨兵-1号(Sentinel-1)卫星作为一种免费的雷达遥感卫星被广泛地应用到雪崩的监测中,哨兵-1号包括2014年发射的哨兵-1A和2016年发射的哨兵-1B,幅宽一般250 km,分辨率20 m×5 m,采用VV和VH极化方式,重访期一般12 d,作为极地卫星,极地的重访期可缩短至2~3 d(表2).一景哨兵-1A(Sentinel-1A)图像即可以覆盖整个Troms县,其面积大约250 km×250 km,水平分辨率约20 m.Malnes等[105]首次将哨兵卫星用于雪崩的监测,他观测了挪威北部Troms县的中等及以上规模的雪崩(雪崩规模分级见表3),其中升轨505个,降轨404个.对比雪崩堆积与周边雪面的微波后向散射变化,雪崩堆积与未受扰动的积雪相比,雪崩堆积表面粗糙度更大,后向散射相应也更大.雪崩堆积在形态上呈舌状向下延伸,其形态很容易与周边环境区分开来.Vickers等[106]引入自动算法大大减少了人工判读的工作量,利用植被地图掩膜排除植被水体,利用>35°坡度掩膜排除较大坡度像元,再排除雪崩前后散射差值<6 dB的像元后,可以识别60%的雪崩堆积.Eckerstorfer等[107]利用多轨道的哨兵-1号卫星资料以及Vickers的算法[108]自动监测了挪威北部2016—2018年150 km×100 km的雪崩活动,经过验证发现最高准确率可以达到82%.2019年Eckerstorfer等[109]利用哨兵-1号卫星资料,在改进算法的基础上,对挪威北部的雪崩进行了自动监测,并对监测到的其中57%的雪崩进行实地验证,发现哨兵-1号监测的准确率达到了79%. ...
... 掩膜技术是自动监测中最常用的工具,比如坡度掩膜可以大大减少自动监测的工作量.根据McClung等[6]的研究,雪崩堆积区的坡度一般在15°以下,一般认为大于35°的地形就不会产生雪崩堆积[16].地形及障碍物对不同雪崩制动作用不同,粉状雪崩的雪崩云主要的阻力来自空气,密实流层的阻滞主要受地表摩擦和地形的影响,如雪崩沟槽出现转弯,密实流受离心力作用常常会出现弯道超高从而堆积在沟槽的外围.统计显示,在相同的坡度和雪崩量的前提下,沟槽雪崩比坡面雪崩运动速度更快、距离也更远.湿雪雪崩由于雪崩流含水量高,更多地呈现出流体的性质向低处填洼,运动速度慢,但运动距离远.对面的山坡和森林都可以对雪崩产生制动作用,其中森林对雪崩的制动与树木的间距和高度有关,当雪崩规模较大时,雪崩可能会跃过或摧毁森林继续前进.利用ArcGIS软件,采用掩膜的方法可以对坡度大于40°、密林以及开阔水体进行剔除[104].在光学遥感的雪崩堆积监测中,一般采用雪崩堆积与周围环境的亮度、纹理等物理特征对遥感影像进行分类. ...
First Sentinel-1 detections of avalanche debris
1
2015
... Wiesmann等[102]最先使用C波段的欧洲ERS1/2雷达进行雪崩观测,发现舌状雪崩堆积的后向散射与周边积雪存在明显差异.Malnes等[103]利用C波段的Radarsat-2 Ultrafine Mode (RS-2U)雷达影像对挪威北部的灾害性雪崩进行了监测,该雷达数据空间分辨率30 m×30 m,幅宽20 km,当雪崩堆积与周围积雪后向散射的差值在1.5~2.3 dB时,雪崩堆积可以用肉眼进行分辨.Eckerstorfer等[70,104]利用12景2014年3月的RS-2U雷达影像对挪威北部Troms县雪崩进行了判读,在读取的546个可能的雪崩堆积中,剔除了顶底倒置、重复读取以及雷达阴影外,获取了467个雪崩的影像,其中37%的雪崩得到了实地或者光学遥感影像的验证.RS-2U雷达影像观测精度较高,但12景影像仅能覆盖Troms县12%的范围.2014年发射的哨兵-1号(Sentinel-1)卫星作为一种免费的雷达遥感卫星被广泛地应用到雪崩的监测中,哨兵-1号包括2014年发射的哨兵-1A和2016年发射的哨兵-1B,幅宽一般250 km,分辨率20 m×5 m,采用VV和VH极化方式,重访期一般12 d,作为极地卫星,极地的重访期可缩短至2~3 d(表2).一景哨兵-1A(Sentinel-1A)图像即可以覆盖整个Troms县,其面积大约250 km×250 km,水平分辨率约20 m.Malnes等[105]首次将哨兵卫星用于雪崩的监测,他观测了挪威北部Troms县的中等及以上规模的雪崩(雪崩规模分级见表3),其中升轨505个,降轨404个.对比雪崩堆积与周边雪面的微波后向散射变化,雪崩堆积与未受扰动的积雪相比,雪崩堆积表面粗糙度更大,后向散射相应也更大.雪崩堆积在形态上呈舌状向下延伸,其形态很容易与周边环境区分开来.Vickers等[106]引入自动算法大大减少了人工判读的工作量,利用植被地图掩膜排除植被水体,利用>35°坡度掩膜排除较大坡度像元,再排除雪崩前后散射差值<6 dB的像元后,可以识别60%的雪崩堆积.Eckerstorfer等[107]利用多轨道的哨兵-1号卫星资料以及Vickers的算法[108]自动监测了挪威北部2016—2018年150 km×100 km的雪崩活动,经过验证发现最高准确率可以达到82%.2019年Eckerstorfer等[109]利用哨兵-1号卫星资料,在改进算法的基础上,对挪威北部的雪崩进行了自动监测,并对监测到的其中57%的雪崩进行实地验证,发现哨兵-1号监测的准确率达到了79%. ...
A method for automated snow avalanche debris detection through use of synthetic aperture radar (SAR) imaging
5
2016
... Wiesmann等[102]最先使用C波段的欧洲ERS1/2雷达进行雪崩观测,发现舌状雪崩堆积的后向散射与周边积雪存在明显差异.Malnes等[103]利用C波段的Radarsat-2 Ultrafine Mode (RS-2U)雷达影像对挪威北部的灾害性雪崩进行了监测,该雷达数据空间分辨率30 m×30 m,幅宽20 km,当雪崩堆积与周围积雪后向散射的差值在1.5~2.3 dB时,雪崩堆积可以用肉眼进行分辨.Eckerstorfer等[70,104]利用12景2014年3月的RS-2U雷达影像对挪威北部Troms县雪崩进行了判读,在读取的546个可能的雪崩堆积中,剔除了顶底倒置、重复读取以及雷达阴影外,获取了467个雪崩的影像,其中37%的雪崩得到了实地或者光学遥感影像的验证.RS-2U雷达影像观测精度较高,但12景影像仅能覆盖Troms县12%的范围.2014年发射的哨兵-1号(Sentinel-1)卫星作为一种免费的雷达遥感卫星被广泛地应用到雪崩的监测中,哨兵-1号包括2014年发射的哨兵-1A和2016年发射的哨兵-1B,幅宽一般250 km,分辨率20 m×5 m,采用VV和VH极化方式,重访期一般12 d,作为极地卫星,极地的重访期可缩短至2~3 d(表2).一景哨兵-1A(Sentinel-1A)图像即可以覆盖整个Troms县,其面积大约250 km×250 km,水平分辨率约20 m.Malnes等[105]首次将哨兵卫星用于雪崩的监测,他观测了挪威北部Troms县的中等及以上规模的雪崩(雪崩规模分级见表3),其中升轨505个,降轨404个.对比雪崩堆积与周边雪面的微波后向散射变化,雪崩堆积与未受扰动的积雪相比,雪崩堆积表面粗糙度更大,后向散射相应也更大.雪崩堆积在形态上呈舌状向下延伸,其形态很容易与周边环境区分开来.Vickers等[106]引入自动算法大大减少了人工判读的工作量,利用植被地图掩膜排除植被水体,利用>35°坡度掩膜排除较大坡度像元,再排除雪崩前后散射差值<6 dB的像元后,可以识别60%的雪崩堆积.Eckerstorfer等[107]利用多轨道的哨兵-1号卫星资料以及Vickers的算法[108]自动监测了挪威北部2016—2018年150 km×100 km的雪崩活动,经过验证发现最高准确率可以达到82%.2019年Eckerstorfer等[109]利用哨兵-1号卫星资料,在改进算法的基础上,对挪威北部的雪崩进行了自动监测,并对监测到的其中57%的雪崩进行实地验证,发现哨兵-1号监测的准确率达到了79%. ...
... 对雷达遥感图像来说,雪崩堆积与周围环境影像的后向散射以及相干性会产生明显的差异.Vickers等[106,108]和Eckerstorfer等[95,107,114]给出了利用动态阈值来进行监测的方法.在下载数据经过前期掩膜、地理编码以及地形校正后获得升轨和降轨像对,以500×500像元输入,经过高斯函数差分滤波(difference of Gaussians,DOG)以及K均值聚类方法可以得到雪崩像元的二元近实时监测图.最重要的滤波步骤是对经过垂直极化和交叉极化后雪崩前后的影像相减,求得后向散射差值影像ΔHH和ΔHV,然后进行高斯函数差分滤波(DOG),滤波的目的是增加后向散射的空间变化梯度,增强的后向散射空间梯度更容易确定雪崩堆积的边界.对滤波后的影像根据均值μ和标准差SD选取两个阈值μ+1.5SD和μ+2.5SD,对图像进行差值处理,选取的阈值越高,得到的像元雪崩的可能性越大.分级步骤是对VV和VH两种极化通道获取的图像分成N个等级,计算雪崩发生前后和参考影像等级的差值.然后选取差值的阈值,使得大于阈值的像元为雪崩像元,小于阈值的为无雪崩像元,从而得到雪崩像元分布图.Vickers等[106,108]认为分成6级最为理想,不但可以反映等级的变化,而且其数据计算量适中,可以获取接近实时的雪崩监测图.Eckerstorfer等[114]采用这种方法对挪威北部的雪崩进行了自动监测,最大的准确率达到了85%,错误率24.9%,算法的可靠性较高. ...
... [106,108]认为分成6级最为理想,不但可以反映等级的变化,而且其数据计算量适中,可以获取接近实时的雪崩监测图.Eckerstorfer等[114]采用这种方法对挪威北部的雪崩进行了自动监测,最大的准确率达到了85%,错误率24.9%,算法的可靠性较高. ...
... 以上算法都是基于后向散射单一指标来确定某些区域是否发生雪崩.最新的研究进展是在充分考虑像元后向散射的基础上,还应考虑雪崩堆积的纹理和形状,以及地形、地表植被等对雪崩识别的影响[71,116].Liu等[71]基于多极化哨兵-1号影像,首先使用H-α分解技术以及SVM和逻辑回归方法对新疆天山山脉的雪崩堆积进行了非监督分类,分类中除后向散射外,还分析了地形和植被参数对分类结果的影响,该方法克服了VV/HH采用固定阈值的缺点[106,117],取得了较好监测结果.Bianchi等[116]将地形及植被作为影响因子利用全卷积神经网络技术(fully convolutional network)对挪威北部6 345条已经人工识别的雪崩进行训练和验证,其识别准确性的F1得分可以达到0.66. ...
... 遥感观测方面,根据藏东南地形高差大、降雪量大以及多湿雪雪崩的特点,拟以RS-2U影像为主要监测传感器进行监测,并以哨兵-1号雷达影像、快鸟或高景-1光学影像进行结果的检验和验证.其具体操作步骤按Wesselink等[117]的方法执行.首先是数据前处理,包括各种影像数据的下载、投影坐标系的转换、2×2像素平滑消除斑纹、图像转换成GeoTIFF格式等.第二步,利用掩膜将<5°和>55°的不可能发生雪崩堆积的地形排除;5°和55°这两个阈值的选取符合雪崩的运动规律,McClung等[6,94]将雪崩形成区始发点和雪崩堆积区最远点的连线与水平线的夹角定义为α[94],他发现百年一遇的大雪崩α在15°~50°之间波动,在这个角度之外几乎很少有雪崩活动.根据Johnston等[128]和Delparte等[129]的统计,大多数雪崩的α值介于20°~40°之间.流通区平均坡度介于30°~15°之间,因为雪崩的动能未能全部耗散,冲击力较大,不会有较大粒径的砾石停留,也不会有树龄长的乔木生长.树龄较长的树木一般都出现在堆积区的远端,这些树木因为受到雪崩的冲击产生树木年轮的异常生长或者疤痕,从而成为历史大雪崩定年的证据[130].第三步,利用超宽带测绘带模式(S-1A extra-wide swath mode,S-1A EW)的哨兵-1A影像或者RADARSAT-2的超精细模式(RS-2 ultrafine mode)生成RGB图像.S-1A EW的特点是覆盖范围大、重访期短,其中红色和蓝色通道为无雪崩活动的参考图像,绿色通道为有雪崩图像,在合成图上,绿色一般为雪崩堆积.第四步,雪崩堆积的人工识别,雪崩堆积在雷达影像上一般呈绿色舌状,并向下延伸,在高分辨率的RS-2U图像上很容易辨识,通过对已发生雪崩堆积的判读,可以建立雪崩堆积后向散射的一组阈值,并制作阈值直方图.为了保证阈值的准确,在判读雪崩影像时一般由两名雪崩研究专业人员共同完成.滤波时阈值选取有固定阈值和动态阈值两种方式,Wesselink等[117]采用3 db、Karbou等[131]、Leinss等[91]采用4 db、Vicker等[106]采用6 db的固定值,发现参考影像为湿雪时分类结果不好.在参考影像为干雪时,雪崩暴发前的气象状况也会对雪崩堆积的分类产生影响[132].为了提高分类的准确性,Tompkin等[1]考虑了局地亮度对后向散射的影响,在计算后向散射时进行了局地分辨率权重的多视处理,采用了1.91 db的阈值进行分类,使得召回率和准确率都有了显著的提高.Eckerstorfer等[114]采用动态阈值,即后向散射μ+1.5SD和μ+2.5SD两种阈值,发现高阈值(2.5SD)的K均值聚类的分类效果更好.取值过高,有些雪崩堆积有可能没有被统计在内;取值过低,有些不是雪崩堆积的区域可能被统计进来.第五步,对无雪崩发生的参考图像和有雪崩发生的图像进行5×5像素中值滤波以消除斑纹.第六步,以雪崩活动的后向散射影像减去无雪崩活动的参考影像生成后向散射变化影像.第七步,生成雷达入射角度、顶底倒置以及雷达阴影等不可能发生雪崩的掩膜,以剔除部分地形影响.第八步,对监测影像使用各种掩膜及散射变化阈值,生成雪崩和无雪崩的二元像素分类.第九步,使用去除小斑块RSO滤波器(Remove Small Objects filter),根据影像分辨率,滤除确定雪崩堆积边界的不规则像元.第十步,采用自适应滤波将具有相同性质的像元连接起来,生成雪崩和无雪崩的二元影像图(图6). ...
Operational avalanche activity monitoring using radar satellites: from Norway to worldwide assistance in avalanche forecasting
2
2018
... Wiesmann等[102]最先使用C波段的欧洲ERS1/2雷达进行雪崩观测,发现舌状雪崩堆积的后向散射与周边积雪存在明显差异.Malnes等[103]利用C波段的Radarsat-2 Ultrafine Mode (RS-2U)雷达影像对挪威北部的灾害性雪崩进行了监测,该雷达数据空间分辨率30 m×30 m,幅宽20 km,当雪崩堆积与周围积雪后向散射的差值在1.5~2.3 dB时,雪崩堆积可以用肉眼进行分辨.Eckerstorfer等[70,104]利用12景2014年3月的RS-2U雷达影像对挪威北部Troms县雪崩进行了判读,在读取的546个可能的雪崩堆积中,剔除了顶底倒置、重复读取以及雷达阴影外,获取了467个雪崩的影像,其中37%的雪崩得到了实地或者光学遥感影像的验证.RS-2U雷达影像观测精度较高,但12景影像仅能覆盖Troms县12%的范围.2014年发射的哨兵-1号(Sentinel-1)卫星作为一种免费的雷达遥感卫星被广泛地应用到雪崩的监测中,哨兵-1号包括2014年发射的哨兵-1A和2016年发射的哨兵-1B,幅宽一般250 km,分辨率20 m×5 m,采用VV和VH极化方式,重访期一般12 d,作为极地卫星,极地的重访期可缩短至2~3 d(表2).一景哨兵-1A(Sentinel-1A)图像即可以覆盖整个Troms县,其面积大约250 km×250 km,水平分辨率约20 m.Malnes等[105]首次将哨兵卫星用于雪崩的监测,他观测了挪威北部Troms县的中等及以上规模的雪崩(雪崩规模分级见表3),其中升轨505个,降轨404个.对比雪崩堆积与周边雪面的微波后向散射变化,雪崩堆积与未受扰动的积雪相比,雪崩堆积表面粗糙度更大,后向散射相应也更大.雪崩堆积在形态上呈舌状向下延伸,其形态很容易与周边环境区分开来.Vickers等[106]引入自动算法大大减少了人工判读的工作量,利用植被地图掩膜排除植被水体,利用>35°坡度掩膜排除较大坡度像元,再排除雪崩前后散射差值<6 dB的像元后,可以识别60%的雪崩堆积.Eckerstorfer等[107]利用多轨道的哨兵-1号卫星资料以及Vickers的算法[108]自动监测了挪威北部2016—2018年150 km×100 km的雪崩活动,经过验证发现最高准确率可以达到82%.2019年Eckerstorfer等[109]利用哨兵-1号卫星资料,在改进算法的基础上,对挪威北部的雪崩进行了自动监测,并对监测到的其中57%的雪崩进行实地验证,发现哨兵-1号监测的准确率达到了79%. ...
... 对雷达遥感图像来说,雪崩堆积与周围环境影像的后向散射以及相干性会产生明显的差异.Vickers等[106,108]和Eckerstorfer等[95,107,114]给出了利用动态阈值来进行监测的方法.在下载数据经过前期掩膜、地理编码以及地形校正后获得升轨和降轨像对,以500×500像元输入,经过高斯函数差分滤波(difference of Gaussians,DOG)以及K均值聚类方法可以得到雪崩像元的二元近实时监测图.最重要的滤波步骤是对经过垂直极化和交叉极化后雪崩前后的影像相减,求得后向散射差值影像ΔHH和ΔHV,然后进行高斯函数差分滤波(DOG),滤波的目的是增加后向散射的空间变化梯度,增强的后向散射空间梯度更容易确定雪崩堆积的边界.对滤波后的影像根据均值μ和标准差SD选取两个阈值μ+1.5SD和μ+2.5SD,对图像进行差值处理,选取的阈值越高,得到的像元雪崩的可能性越大.分级步骤是对VV和VH两种极化通道获取的图像分成N个等级,计算雪崩发生前后和参考影像等级的差值.然后选取差值的阈值,使得大于阈值的像元为雪崩像元,小于阈值的为无雪崩像元,从而得到雪崩像元分布图.Vickers等[106,108]认为分成6级最为理想,不但可以反映等级的变化,而且其数据计算量适中,可以获取接近实时的雪崩监测图.Eckerstorfer等[114]采用这种方法对挪威北部的雪崩进行了自动监测,最大的准确率达到了85%,错误率24.9%,算法的可靠性较高. ...
Synthetic Aperture radar (sar) monitoring of avalanche activity: an automated detection scheme
5
2017
... Wiesmann等[102]最先使用C波段的欧洲ERS1/2雷达进行雪崩观测,发现舌状雪崩堆积的后向散射与周边积雪存在明显差异.Malnes等[103]利用C波段的Radarsat-2 Ultrafine Mode (RS-2U)雷达影像对挪威北部的灾害性雪崩进行了监测,该雷达数据空间分辨率30 m×30 m,幅宽20 km,当雪崩堆积与周围积雪后向散射的差值在1.5~2.3 dB时,雪崩堆积可以用肉眼进行分辨.Eckerstorfer等[70,104]利用12景2014年3月的RS-2U雷达影像对挪威北部Troms县雪崩进行了判读,在读取的546个可能的雪崩堆积中,剔除了顶底倒置、重复读取以及雷达阴影外,获取了467个雪崩的影像,其中37%的雪崩得到了实地或者光学遥感影像的验证.RS-2U雷达影像观测精度较高,但12景影像仅能覆盖Troms县12%的范围.2014年发射的哨兵-1号(Sentinel-1)卫星作为一种免费的雷达遥感卫星被广泛地应用到雪崩的监测中,哨兵-1号包括2014年发射的哨兵-1A和2016年发射的哨兵-1B,幅宽一般250 km,分辨率20 m×5 m,采用VV和VH极化方式,重访期一般12 d,作为极地卫星,极地的重访期可缩短至2~3 d(表2).一景哨兵-1A(Sentinel-1A)图像即可以覆盖整个Troms县,其面积大约250 km×250 km,水平分辨率约20 m.Malnes等[105]首次将哨兵卫星用于雪崩的监测,他观测了挪威北部Troms县的中等及以上规模的雪崩(雪崩规模分级见表3),其中升轨505个,降轨404个.对比雪崩堆积与周边雪面的微波后向散射变化,雪崩堆积与未受扰动的积雪相比,雪崩堆积表面粗糙度更大,后向散射相应也更大.雪崩堆积在形态上呈舌状向下延伸,其形态很容易与周边环境区分开来.Vickers等[106]引入自动算法大大减少了人工判读的工作量,利用植被地图掩膜排除植被水体,利用>35°坡度掩膜排除较大坡度像元,再排除雪崩前后散射差值<6 dB的像元后,可以识别60%的雪崩堆积.Eckerstorfer等[107]利用多轨道的哨兵-1号卫星资料以及Vickers的算法[108]自动监测了挪威北部2016—2018年150 km×100 km的雪崩活动,经过验证发现最高准确率可以达到82%.2019年Eckerstorfer等[109]利用哨兵-1号卫星资料,在改进算法的基础上,对挪威北部的雪崩进行了自动监测,并对监测到的其中57%的雪崩进行实地验证,发现哨兵-1号监测的准确率达到了79%. ...
... 利用卫星雷达监测雪崩的最大优点是不受光照和天气因素的影响,可以进行全天候监测.缺点是容易受到地形影响,也会受到卫星重访周期的影响,对雪崩周期(avalanche cycle)内雪崩高发时段灾害的发生无法进行加密观测,在雪崩堆积被新降湿雪覆盖时其后向散射无法与周围环境的后向散射进行区分,造成雪崩记录的遗漏,而且监测费用比较昂贵.一个经过地理编码的高分辨率SAR影像,如RS-2U,熟练的观测人员可以分辨出较小规模的雪崩.但较小雷达入射角形成影像的顶底倒置和透视收缩往往会影响雪崩判读的结果.2014年后的哨兵-1号雷达影像可以在网上免费下载,但其分辨率较低,使得哨兵-1号仅能准确监测到4级和5级的大型和超大型雪崩,对1级和2级雪崩无法判别,对三级雪崩仅能监测50%左右(表3)[91].利用自动算法可以减少雪崩雷达监测的工作量,但对比雪崩前后散射变化时,不同时段参考影像的选取会大大影响自动监测的准确率,选取不同的掩膜可能会导致像元在K均值聚类时混淆雪崩堆积与其他地物[108],这也说明仅依靠后向散射一项指标监测雪崩会存在较大误差. ...
... 对雷达遥感图像来说,雪崩堆积与周围环境影像的后向散射以及相干性会产生明显的差异.Vickers等[106,108]和Eckerstorfer等[95,107,114]给出了利用动态阈值来进行监测的方法.在下载数据经过前期掩膜、地理编码以及地形校正后获得升轨和降轨像对,以500×500像元输入,经过高斯函数差分滤波(difference of Gaussians,DOG)以及K均值聚类方法可以得到雪崩像元的二元近实时监测图.最重要的滤波步骤是对经过垂直极化和交叉极化后雪崩前后的影像相减,求得后向散射差值影像ΔHH和ΔHV,然后进行高斯函数差分滤波(DOG),滤波的目的是增加后向散射的空间变化梯度,增强的后向散射空间梯度更容易确定雪崩堆积的边界.对滤波后的影像根据均值μ和标准差SD选取两个阈值μ+1.5SD和μ+2.5SD,对图像进行差值处理,选取的阈值越高,得到的像元雪崩的可能性越大.分级步骤是对VV和VH两种极化通道获取的图像分成N个等级,计算雪崩发生前后和参考影像等级的差值.然后选取差值的阈值,使得大于阈值的像元为雪崩像元,小于阈值的为无雪崩像元,从而得到雪崩像元分布图.Vickers等[106,108]认为分成6级最为理想,不但可以反映等级的变化,而且其数据计算量适中,可以获取接近实时的雪崩监测图.Eckerstorfer等[114]采用这种方法对挪威北部的雪崩进行了自动监测,最大的准确率达到了85%,错误率24.9%,算法的可靠性较高. ...
... ,108]认为分成6级最为理想,不但可以反映等级的变化,而且其数据计算量适中,可以获取接近实时的雪崩监测图.Eckerstorfer等[114]采用这种方法对挪威北部的雪崩进行了自动监测,最大的准确率达到了85%,错误率24.9%,算法的可靠性较高. ...
... 根据藏东南的气象条件,利用星载SAR进行雪崩监测成为首选.因为雪崩发生在气温回升的春季,降雨和雪面融水下渗可能是雪崩活动增加的主要因素.在雪面水分增加时,后向散射由体散射迅速向大气-雪面散射转化,散射值会呈现明显的变化,在雪崩暴发前就可以利用C波段SAR的交叉极化判别危险雪体的干湿变化[93].藏东南的雪崩具有湿雪雪崩的运动及堆积特点,如雪崩运动速度较慢,雪崩运动时常携带大量的固体物质,使得雪崩堆积一般呈暗色甚至黑色,雪崩堆积体表面的粗糙度较大(图3),这些变化都对雪崩的遥感判读非常有利.Wesselink等[117]和Eckerstorfer等[112]的研究表明,后向散射对高密度以及表面粗糙度较大的雪面非常敏感,虽然其中的具体机理还有待进一步的研究.根据Vickers等[108]的研究,散射阈值分类方法在雪崩从干雪向湿雪转化时,雪崩堆积判读的准确率只有50%,而在从干雪向湿雪转化时,判读的准确率可以达到90%,藏东南雪崩周期刚好从干雪向湿雪转化,因而星载SAR非常适合在藏东南进行雪崩监测.在星载雷达中,RS-2U和哨兵-1号是两种重要选项,哨兵-1号是一种免费的雷达影像(表1),但哨兵-1号空间分辨率较低,对一级到三级的小型雪崩无法判别,中型雪崩判读的概率也不高,加之其在中低纬度的重访期为12天,而藏东南春季降雪频率较高、降雪量大,如果雪崩堆积被新降湿雪覆盖以及风吹雪平滑,哨兵-1号重访时可能无法观测到已经发生的雪崩,造成雪崩观测的漏测.RS-2U空间分辨率3 m×3 m,重访期1天,可以满足藏东南雪崩监测的要求. ...
All-weather avalanche activity monitoring from space?
1
2014
... Wiesmann等[102]最先使用C波段的欧洲ERS1/2雷达进行雪崩观测,发现舌状雪崩堆积的后向散射与周边积雪存在明显差异.Malnes等[103]利用C波段的Radarsat-2 Ultrafine Mode (RS-2U)雷达影像对挪威北部的灾害性雪崩进行了监测,该雷达数据空间分辨率30 m×30 m,幅宽20 km,当雪崩堆积与周围积雪后向散射的差值在1.5~2.3 dB时,雪崩堆积可以用肉眼进行分辨.Eckerstorfer等[70,104]利用12景2014年3月的RS-2U雷达影像对挪威北部Troms县雪崩进行了判读,在读取的546个可能的雪崩堆积中,剔除了顶底倒置、重复读取以及雷达阴影外,获取了467个雪崩的影像,其中37%的雪崩得到了实地或者光学遥感影像的验证.RS-2U雷达影像观测精度较高,但12景影像仅能覆盖Troms县12%的范围.2014年发射的哨兵-1号(Sentinel-1)卫星作为一种免费的雷达遥感卫星被广泛地应用到雪崩的监测中,哨兵-1号包括2014年发射的哨兵-1A和2016年发射的哨兵-1B,幅宽一般250 km,分辨率20 m×5 m,采用VV和VH极化方式,重访期一般12 d,作为极地卫星,极地的重访期可缩短至2~3 d(表2).一景哨兵-1A(Sentinel-1A)图像即可以覆盖整个Troms县,其面积大约250 km×250 km,水平分辨率约20 m.Malnes等[105]首次将哨兵卫星用于雪崩的监测,他观测了挪威北部Troms县的中等及以上规模的雪崩(雪崩规模分级见表3),其中升轨505个,降轨404个.对比雪崩堆积与周边雪面的微波后向散射变化,雪崩堆积与未受扰动的积雪相比,雪崩堆积表面粗糙度更大,后向散射相应也更大.雪崩堆积在形态上呈舌状向下延伸,其形态很容易与周边环境区分开来.Vickers等[106]引入自动算法大大减少了人工判读的工作量,利用植被地图掩膜排除植被水体,利用>35°坡度掩膜排除较大坡度像元,再排除雪崩前后散射差值<6 dB的像元后,可以识别60%的雪崩堆积.Eckerstorfer等[107]利用多轨道的哨兵-1号卫星资料以及Vickers的算法[108]自动监测了挪威北部2016—2018年150 km×100 km的雪崩活动,经过验证发现最高准确率可以达到82%.2019年Eckerstorfer等[109]利用哨兵-1号卫星资料,在改进算法的基础上,对挪威北部的雪崩进行了自动监测,并对监测到的其中57%的雪崩进行实地验证,发现哨兵-1号监测的准确率达到了79%. ...
A large wet snow avalanche cycle in West Greenland quantified using remote sensing and in situ observations
2
2019
... 星载SAR的雪崩基础研究成果近年来已经被应用到实际应用研究之中.Abermann等[110]利用哨兵-1号雷达遥感资料,采用雪崩堆积与周边未受雪崩扰动雪面的后向散射的动态阈值监测方法,监测了2016年格陵兰西部的湿雪雪崩状况,并揭示了湿雪和雪泥(slushflow)与气象因子及大气环流的关系,指出在雪层较薄时的突然升温及高强度降雪是该地区湿雪雪崩形成的主要原因.Hafner等[111]将哨兵-1号的卫星雷达影像用于雪崩的风险制图中,与SPOT卫星以及哨兵-2号等光学遥感相比,哨兵-1号在监测大型雪崩方面比较准确(表3),对中小规模雪崩的监测存在较大误差,这与Abermann等[110]的研究一致. ...
... [110]的研究一致. ...
Mapping avalanches with satellites: evaluation of performance and completeness
1
2021
... 星载SAR的雪崩基础研究成果近年来已经被应用到实际应用研究之中.Abermann等[110]利用哨兵-1号雷达遥感资料,采用雪崩堆积与周边未受雪崩扰动雪面的后向散射的动态阈值监测方法,监测了2016年格陵兰西部的湿雪雪崩状况,并揭示了湿雪和雪泥(slushflow)与气象因子及大气环流的关系,指出在雪层较薄时的突然升温及高强度降雪是该地区湿雪雪崩形成的主要原因.Hafner等[111]将哨兵-1号的卫星雷达影像用于雪崩的风险制图中,与SPOT卫星以及哨兵-2号等光学遥感相比,哨兵-1号在监测大型雪崩方面比较准确(表3),对中小规模雪崩的监测存在较大误差,这与Abermann等[110]的研究一致. ...
Remote sensing of snow avalanches: potential and limitation for operational use
3
2015
... 雪崩监测中光学、LiDAR和雷达三种传感器的综合排名(修改自文献[112]) ...
... Ranking of optical, LiDAR and radar sensor platforms based on advantages and disadvantages (Revised on the basis of Reference [112]) ...
... 根据藏东南的气象条件,利用星载SAR进行雪崩监测成为首选.因为雪崩发生在气温回升的春季,降雨和雪面融水下渗可能是雪崩活动增加的主要因素.在雪面水分增加时,后向散射由体散射迅速向大气-雪面散射转化,散射值会呈现明显的变化,在雪崩暴发前就可以利用C波段SAR的交叉极化判别危险雪体的干湿变化[93].藏东南的雪崩具有湿雪雪崩的运动及堆积特点,如雪崩运动速度较慢,雪崩运动时常携带大量的固体物质,使得雪崩堆积一般呈暗色甚至黑色,雪崩堆积体表面的粗糙度较大(图3),这些变化都对雪崩的遥感判读非常有利.Wesselink等[117]和Eckerstorfer等[112]的研究表明,后向散射对高密度以及表面粗糙度较大的雪面非常敏感,虽然其中的具体机理还有待进一步的研究.根据Vickers等[108]的研究,散射阈值分类方法在雪崩从干雪向湿雪转化时,雪崩堆积判读的准确率只有50%,而在从干雪向湿雪转化时,判读的准确率可以达到90%,藏东南雪崩周期刚好从干雪向湿雪转化,因而星载SAR非常适合在藏东南进行雪崩监测.在星载雷达中,RS-2U和哨兵-1号是两种重要选项,哨兵-1号是一种免费的雷达影像(表1),但哨兵-1号空间分辨率较低,对一级到三级的小型雪崩无法判别,中型雪崩判读的概率也不高,加之其在中低纬度的重访期为12天,而藏东南春季降雪频率较高、降雪量大,如果雪崩堆积被新降湿雪覆盖以及风吹雪平滑,哨兵-1号重访时可能无法观测到已经发生的雪崩,造成雪崩观测的漏测.RS-2U空间分辨率3 m×3 m,重访期1天,可以满足藏东南雪崩监测的要求. ...
Remote-sensing derived avalanche inventory data
1
2012
... 雪崩的遥感监测通常受以下几个方面因素的影响:监测时间间隔、监测范围、空间分辨率、监测费用、对天气的依赖状况、技术难度、操作难易程度等.Frauenfelder等[113]指出通过遥感获取雪崩记录的可靠性是雪崩预测模型是否准确的基础,而监测中小规模的雪崩时遥感数据的水平分辨率是最主要的制约因素,Eckerstorfer等[38]认为,监测雪崩运动距离介于10~100 m的小型雪崩时,遥感数据的分辨率必须小于30 m.只有在分辨率得到保证时,监测的漏分误差(omission error)和错分误差(commision eror)才可能减小.在雪崩规模较大、雪崩堆积与周边环境对比度较大或者雷达入射角较为有利时,一些分辨率较高的雷达卫星数据如哨兵-1号才可以使用.但分辨率较高时幅宽一般都较小,观测范围有限. ...
Near-real time automatic snow avalanche activity monitoring system using Sentinel-1 SAR data in Norway
3
2019
... 对雷达遥感图像来说,雪崩堆积与周围环境影像的后向散射以及相干性会产生明显的差异.Vickers等[106,108]和Eckerstorfer等[95,107,114]给出了利用动态阈值来进行监测的方法.在下载数据经过前期掩膜、地理编码以及地形校正后获得升轨和降轨像对,以500×500像元输入,经过高斯函数差分滤波(difference of Gaussians,DOG)以及K均值聚类方法可以得到雪崩像元的二元近实时监测图.最重要的滤波步骤是对经过垂直极化和交叉极化后雪崩前后的影像相减,求得后向散射差值影像ΔHH和ΔHV,然后进行高斯函数差分滤波(DOG),滤波的目的是增加后向散射的空间变化梯度,增强的后向散射空间梯度更容易确定雪崩堆积的边界.对滤波后的影像根据均值μ和标准差SD选取两个阈值μ+1.5SD和μ+2.5SD,对图像进行差值处理,选取的阈值越高,得到的像元雪崩的可能性越大.分级步骤是对VV和VH两种极化通道获取的图像分成N个等级,计算雪崩发生前后和参考影像等级的差值.然后选取差值的阈值,使得大于阈值的像元为雪崩像元,小于阈值的为无雪崩像元,从而得到雪崩像元分布图.Vickers等[106,108]认为分成6级最为理想,不但可以反映等级的变化,而且其数据计算量适中,可以获取接近实时的雪崩监测图.Eckerstorfer等[114]采用这种方法对挪威北部的雪崩进行了自动监测,最大的准确率达到了85%,错误率24.9%,算法的可靠性较高. ...
... [114]采用这种方法对挪威北部的雪崩进行了自动监测,最大的准确率达到了85%,错误率24.9%,算法的可靠性较高. ...
... 遥感观测方面,根据藏东南地形高差大、降雪量大以及多湿雪雪崩的特点,拟以RS-2U影像为主要监测传感器进行监测,并以哨兵-1号雷达影像、快鸟或高景-1光学影像进行结果的检验和验证.其具体操作步骤按Wesselink等[117]的方法执行.首先是数据前处理,包括各种影像数据的下载、投影坐标系的转换、2×2像素平滑消除斑纹、图像转换成GeoTIFF格式等.第二步,利用掩膜将<5°和>55°的不可能发生雪崩堆积的地形排除;5°和55°这两个阈值的选取符合雪崩的运动规律,McClung等[6,94]将雪崩形成区始发点和雪崩堆积区最远点的连线与水平线的夹角定义为α[94],他发现百年一遇的大雪崩α在15°~50°之间波动,在这个角度之外几乎很少有雪崩活动.根据Johnston等[128]和Delparte等[129]的统计,大多数雪崩的α值介于20°~40°之间.流通区平均坡度介于30°~15°之间,因为雪崩的动能未能全部耗散,冲击力较大,不会有较大粒径的砾石停留,也不会有树龄长的乔木生长.树龄较长的树木一般都出现在堆积区的远端,这些树木因为受到雪崩的冲击产生树木年轮的异常生长或者疤痕,从而成为历史大雪崩定年的证据[130].第三步,利用超宽带测绘带模式(S-1A extra-wide swath mode,S-1A EW)的哨兵-1A影像或者RADARSAT-2的超精细模式(RS-2 ultrafine mode)生成RGB图像.S-1A EW的特点是覆盖范围大、重访期短,其中红色和蓝色通道为无雪崩活动的参考图像,绿色通道为有雪崩图像,在合成图上,绿色一般为雪崩堆积.第四步,雪崩堆积的人工识别,雪崩堆积在雷达影像上一般呈绿色舌状,并向下延伸,在高分辨率的RS-2U图像上很容易辨识,通过对已发生雪崩堆积的判读,可以建立雪崩堆积后向散射的一组阈值,并制作阈值直方图.为了保证阈值的准确,在判读雪崩影像时一般由两名雪崩研究专业人员共同完成.滤波时阈值选取有固定阈值和动态阈值两种方式,Wesselink等[117]采用3 db、Karbou等[131]、Leinss等[91]采用4 db、Vicker等[106]采用6 db的固定值,发现参考影像为湿雪时分类结果不好.在参考影像为干雪时,雪崩暴发前的气象状况也会对雪崩堆积的分类产生影响[132].为了提高分类的准确性,Tompkin等[1]考虑了局地亮度对后向散射的影响,在计算后向散射时进行了局地分辨率权重的多视处理,采用了1.91 db的阈值进行分类,使得召回率和准确率都有了显著的提高.Eckerstorfer等[114]采用动态阈值,即后向散射μ+1.5SD和μ+2.5SD两种阈值,发现高阈值(2.5SD)的K均值聚类的分类效果更好.取值过高,有些雪崩堆积有可能没有被统计在内;取值过低,有些不是雪崩堆积的区域可能被统计进来.第五步,对无雪崩发生的参考图像和有雪崩发生的图像进行5×5像素中值滤波以消除斑纹.第六步,以雪崩活动的后向散射影像减去无雪崩活动的参考影像生成后向散射变化影像.第七步,生成雷达入射角度、顶底倒置以及雷达阴影等不可能发生雪崩的掩膜,以剔除部分地形影响.第八步,对监测影像使用各种掩膜及散射变化阈值,生成雪崩和无雪崩的二元像素分类.第九步,使用去除小斑块RSO滤波器(Remove Small Objects filter),根据影像分辨率,滤除确定雪崩堆积边界的不规则像元.第十步,采用自适应滤波将具有相同性质的像元连接起来,生成雪崩和无雪崩的二元影像图(图6). ...
Automatic detection of regional snow avalanches with scattering and interference of C-band SAR data
1
2020
... Yang等[115]采用支持向量机(Support Vector Machine, SVM)方法对雪崩前后的极化熵、相干性以及后向散射等各种参数进行分类来制作雪崩的分布图,也取得了较好的自动监测结果. ...
Snow avalanche segmentation in SAR images with fully convolutional neural networks
2
2020
... 以上算法都是基于后向散射单一指标来确定某些区域是否发生雪崩.最新的研究进展是在充分考虑像元后向散射的基础上,还应考虑雪崩堆积的纹理和形状,以及地形、地表植被等对雪崩识别的影响[71,116].Liu等[71]基于多极化哨兵-1号影像,首先使用H-α分解技术以及SVM和逻辑回归方法对新疆天山山脉的雪崩堆积进行了非监督分类,分类中除后向散射外,还分析了地形和植被参数对分类结果的影响,该方法克服了VV/HH采用固定阈值的缺点[106,117],取得了较好监测结果.Bianchi等[116]将地形及植被作为影响因子利用全卷积神经网络技术(fully convolutional network)对挪威北部6 345条已经人工识别的雪崩进行训练和验证,其识别准确性的F1得分可以达到0.66. ...
... [116]将地形及植被作为影响因子利用全卷积神经网络技术(fully convolutional network)对挪威北部6 345条已经人工识别的雪崩进行训练和验证,其识别准确性的F1得分可以达到0.66. ...
Automatic detection of snow avalanche debris in central Svalbard using C-band SAR data
4
2017
... 以上算法都是基于后向散射单一指标来确定某些区域是否发生雪崩.最新的研究进展是在充分考虑像元后向散射的基础上,还应考虑雪崩堆积的纹理和形状,以及地形、地表植被等对雪崩识别的影响[71,116].Liu等[71]基于多极化哨兵-1号影像,首先使用H-α分解技术以及SVM和逻辑回归方法对新疆天山山脉的雪崩堆积进行了非监督分类,分类中除后向散射外,还分析了地形和植被参数对分类结果的影响,该方法克服了VV/HH采用固定阈值的缺点[106,117],取得了较好监测结果.Bianchi等[116]将地形及植被作为影响因子利用全卷积神经网络技术(fully convolutional network)对挪威北部6 345条已经人工识别的雪崩进行训练和验证,其识别准确性的F1得分可以达到0.66. ...
... 根据藏东南的气象条件,利用星载SAR进行雪崩监测成为首选.因为雪崩发生在气温回升的春季,降雨和雪面融水下渗可能是雪崩活动增加的主要因素.在雪面水分增加时,后向散射由体散射迅速向大气-雪面散射转化,散射值会呈现明显的变化,在雪崩暴发前就可以利用C波段SAR的交叉极化判别危险雪体的干湿变化[93].藏东南的雪崩具有湿雪雪崩的运动及堆积特点,如雪崩运动速度较慢,雪崩运动时常携带大量的固体物质,使得雪崩堆积一般呈暗色甚至黑色,雪崩堆积体表面的粗糙度较大(图3),这些变化都对雪崩的遥感判读非常有利.Wesselink等[117]和Eckerstorfer等[112]的研究表明,后向散射对高密度以及表面粗糙度较大的雪面非常敏感,虽然其中的具体机理还有待进一步的研究.根据Vickers等[108]的研究,散射阈值分类方法在雪崩从干雪向湿雪转化时,雪崩堆积判读的准确率只有50%,而在从干雪向湿雪转化时,判读的准确率可以达到90%,藏东南雪崩周期刚好从干雪向湿雪转化,因而星载SAR非常适合在藏东南进行雪崩监测.在星载雷达中,RS-2U和哨兵-1号是两种重要选项,哨兵-1号是一种免费的雷达影像(表1),但哨兵-1号空间分辨率较低,对一级到三级的小型雪崩无法判别,中型雪崩判读的概率也不高,加之其在中低纬度的重访期为12天,而藏东南春季降雪频率较高、降雪量大,如果雪崩堆积被新降湿雪覆盖以及风吹雪平滑,哨兵-1号重访时可能无法观测到已经发生的雪崩,造成雪崩观测的漏测.RS-2U空间分辨率3 m×3 m,重访期1天,可以满足藏东南雪崩监测的要求. ...
... 遥感观测方面,根据藏东南地形高差大、降雪量大以及多湿雪雪崩的特点,拟以RS-2U影像为主要监测传感器进行监测,并以哨兵-1号雷达影像、快鸟或高景-1光学影像进行结果的检验和验证.其具体操作步骤按Wesselink等[117]的方法执行.首先是数据前处理,包括各种影像数据的下载、投影坐标系的转换、2×2像素平滑消除斑纹、图像转换成GeoTIFF格式等.第二步,利用掩膜将<5°和>55°的不可能发生雪崩堆积的地形排除;5°和55°这两个阈值的选取符合雪崩的运动规律,McClung等[6,94]将雪崩形成区始发点和雪崩堆积区最远点的连线与水平线的夹角定义为α[94],他发现百年一遇的大雪崩α在15°~50°之间波动,在这个角度之外几乎很少有雪崩活动.根据Johnston等[128]和Delparte等[129]的统计,大多数雪崩的α值介于20°~40°之间.流通区平均坡度介于30°~15°之间,因为雪崩的动能未能全部耗散,冲击力较大,不会有较大粒径的砾石停留,也不会有树龄长的乔木生长.树龄较长的树木一般都出现在堆积区的远端,这些树木因为受到雪崩的冲击产生树木年轮的异常生长或者疤痕,从而成为历史大雪崩定年的证据[130].第三步,利用超宽带测绘带模式(S-1A extra-wide swath mode,S-1A EW)的哨兵-1A影像或者RADARSAT-2的超精细模式(RS-2 ultrafine mode)生成RGB图像.S-1A EW的特点是覆盖范围大、重访期短,其中红色和蓝色通道为无雪崩活动的参考图像,绿色通道为有雪崩图像,在合成图上,绿色一般为雪崩堆积.第四步,雪崩堆积的人工识别,雪崩堆积在雷达影像上一般呈绿色舌状,并向下延伸,在高分辨率的RS-2U图像上很容易辨识,通过对已发生雪崩堆积的判读,可以建立雪崩堆积后向散射的一组阈值,并制作阈值直方图.为了保证阈值的准确,在判读雪崩影像时一般由两名雪崩研究专业人员共同完成.滤波时阈值选取有固定阈值和动态阈值两种方式,Wesselink等[117]采用3 db、Karbou等[131]、Leinss等[91]采用4 db、Vicker等[106]采用6 db的固定值,发现参考影像为湿雪时分类结果不好.在参考影像为干雪时,雪崩暴发前的气象状况也会对雪崩堆积的分类产生影响[132].为了提高分类的准确性,Tompkin等[1]考虑了局地亮度对后向散射的影响,在计算后向散射时进行了局地分辨率权重的多视处理,采用了1.91 db的阈值进行分类,使得召回率和准确率都有了显著的提高.Eckerstorfer等[114]采用动态阈值,即后向散射μ+1.5SD和μ+2.5SD两种阈值,发现高阈值(2.5SD)的K均值聚类的分类效果更好.取值过高,有些雪崩堆积有可能没有被统计在内;取值过低,有些不是雪崩堆积的区域可能被统计进来.第五步,对无雪崩发生的参考图像和有雪崩发生的图像进行5×5像素中值滤波以消除斑纹.第六步,以雪崩活动的后向散射影像减去无雪崩活动的参考影像生成后向散射变化影像.第七步,生成雷达入射角度、顶底倒置以及雷达阴影等不可能发生雪崩的掩膜,以剔除部分地形影响.第八步,对监测影像使用各种掩膜及散射变化阈值,生成雪崩和无雪崩的二元像素分类.第九步,使用去除小斑块RSO滤波器(Remove Small Objects filter),根据影像分辨率,滤除确定雪崩堆积边界的不规则像元.第十步,采用自适应滤波将具有相同性质的像元连接起来,生成雪崩和无雪崩的二元影像图(图6). ...
... [117]采用3 db、Karbou等[131]、Leinss等[91]采用4 db、Vicker等[106]采用6 db的固定值,发现参考影像为湿雪时分类结果不好.在参考影像为干雪时,雪崩暴发前的气象状况也会对雪崩堆积的分类产生影响[132].为了提高分类的准确性,Tompkin等[1]考虑了局地亮度对后向散射的影响,在计算后向散射时进行了局地分辨率权重的多视处理,采用了1.91 db的阈值进行分类,使得召回率和准确率都有了显著的提高.Eckerstorfer等[114]采用动态阈值,即后向散射μ+1.5SD和μ+2.5SD两种阈值,发现高阈值(2.5SD)的K均值聚类的分类效果更好.取值过高,有些雪崩堆积有可能没有被统计在内;取值过低,有些不是雪崩堆积的区域可能被统计进来.第五步,对无雪崩发生的参考图像和有雪崩发生的图像进行5×5像素中值滤波以消除斑纹.第六步,以雪崩活动的后向散射影像减去无雪崩活动的参考影像生成后向散射变化影像.第七步,生成雷达入射角度、顶底倒置以及雷达阴影等不可能发生雪崩的掩膜,以剔除部分地形影响.第八步,对监测影像使用各种掩膜及散射变化阈值,生成雪崩和无雪崩的二元像素分类.第九步,使用去除小斑块RSO滤波器(Remove Small Objects filter),根据影像分辨率,滤除确定雪崩堆积边界的不规则像元.第十步,采用自适应滤波将具有相同性质的像元连接起来,生成雪崩和无雪崩的二元影像图(图6). ...
Recent advances in the remote sensing of alpine snow: a review
1
2021
... 当前雪崩的遥感监测研究主要集中在雪崩的堆积区,因为雪崩形成区和流通区难以到达,遥感监测研究工作开展不多.雪崩形成区(释放区)积雪的各种性质和几何参数及其变化可以通过遥感手段进行监测[118-119],这些参数包括:积雪密度、深度、粒径和含水量等.这些参数是雪崩的第二类预测因子,其重要性要高于气象气候因子[6].如果能获取高分辨率的近实时参数,对于雪崩的预测预警无疑具有非常重要的意义[120]. ...
Snow depth retrieval in North-Western Himalayan region using pursuit-monostatic TanDEM-X datasets applying polarimetric synthetic aperture radar interferometry based inversion modelling
1
2021
... 当前雪崩的遥感监测研究主要集中在雪崩的堆积区,因为雪崩形成区和流通区难以到达,遥感监测研究工作开展不多.雪崩形成区(释放区)积雪的各种性质和几何参数及其变化可以通过遥感手段进行监测[118-119],这些参数包括:积雪密度、深度、粒径和含水量等.这些参数是雪崩的第二类预测因子,其重要性要高于气象气候因子[6].如果能获取高分辨率的近实时参数,对于雪崩的预测预警无疑具有非常重要的意义[120]. ...
Influence of snow cover properties on avalanche dynamics
1
2014
... 当前雪崩的遥感监测研究主要集中在雪崩的堆积区,因为雪崩形成区和流通区难以到达,遥感监测研究工作开展不多.雪崩形成区(释放区)积雪的各种性质和几何参数及其变化可以通过遥感手段进行监测[118-119],这些参数包括:积雪密度、深度、粒径和含水量等.这些参数是雪崩的第二类预测因子,其重要性要高于气象气候因子[6].如果能获取高分辨率的近实时参数,对于雪崩的预测预警无疑具有非常重要的意义[120]. ...
1
1992
... 藏东南是我国雪崩分布广泛而且危害严重的地区,雪崩主要分布于318国道的安久拉至通麦路段、扎墨(波密扎木—墨脱)公路的嘎隆拉隧道两侧、派墨公路的多雄拉隧道东侧以及察隅公路的部分地区.藏东南雪崩以湿雪雪崩为主,多发生在2—4月,这一时期的降雪较多,为湿雪雪崩的发生提供了丰富的物源.同时,这一时期气温的回升也比较强烈,产生的融水或者降雨都会成为湿雪雪崩暴发的诱发因素.王彦龙[121]的实地观测发现,318国道83道班附近的最大积雪厚度一般都在1.5 m以上,而扎墨公路嘎龙寺春季的积雪厚度一般都超过2 m.虽然藏东南的气象观测较少,但从积雪厚度可以推断,这一地区尤其扎墨公路和察隅公路的降雪量是相当大的.由于藏东南春季雪崩周期内降雪多,阴天、雨雪天以及雾天也相应较多,受天气因素影响较为严重的光学传感器,无论搭载在哪种平台之上,都不适宜作为主要的传感器来监测这一地区的雪崩活动,但可以作为辅助的监测手段来验证其他传感器监测的结果. ...
1
1992
... 藏东南是我国雪崩分布广泛而且危害严重的地区,雪崩主要分布于318国道的安久拉至通麦路段、扎墨(波密扎木—墨脱)公路的嘎隆拉隧道两侧、派墨公路的多雄拉隧道东侧以及察隅公路的部分地区.藏东南雪崩以湿雪雪崩为主,多发生在2—4月,这一时期的降雪较多,为湿雪雪崩的发生提供了丰富的物源.同时,这一时期气温的回升也比较强烈,产生的融水或者降雨都会成为湿雪雪崩暴发的诱发因素.王彦龙[121]的实地观测发现,318国道83道班附近的最大积雪厚度一般都在1.5 m以上,而扎墨公路嘎龙寺春季的积雪厚度一般都超过2 m.虽然藏东南的气象观测较少,但从积雪厚度可以推断,这一地区尤其扎墨公路和察隅公路的降雪量是相当大的.由于藏东南春季雪崩周期内降雪多,阴天、雨雪天以及雾天也相应较多,受天气因素影响较为严重的光学传感器,无论搭载在哪种平台之上,都不适宜作为主要的传感器来监测这一地区的雪崩活动,但可以作为辅助的监测手段来验证其他传感器监测的结果. ...
A conceptual model of avalanche hazard
1
2018
... 实地观测最核心的步骤是选择不同海拔不同朝向的潜在不稳定积雪测量雪体的机械力学性质,进行雪体试验获取雪体的稳定性,结合小尺度或降尺度临近天气预报揭示雪体稳定性的变化规律,利用雪崩概念模型[122],预测雪崩发生的可能位置、海拔以及雪崩规模,并利用微信公众号或地方电视台实时向公众发布雪崩危险等级预报.经笔者现场调查,扎墨公路的24K嘎龙寺附近有较为舒缓的山间盆地,隧道修建以前的老公路可以到达海拔较高的山脊部位,人员易于攀登,是比较良好的雪层剖面观测场所,可以选为长期的雪崩试验场所,进行多种雪体试验(图4).足够多的不同坡度、坡向、海拔的雪体试验很容易发现某个时刻的雪体稳定性规律[123]. ...
Verification of regional snowpack stability and avalanche danger
1
2003
... 实地观测最核心的步骤是选择不同海拔不同朝向的潜在不稳定积雪测量雪体的机械力学性质,进行雪体试验获取雪体的稳定性,结合小尺度或降尺度临近天气预报揭示雪体稳定性的变化规律,利用雪崩概念模型[122],预测雪崩发生的可能位置、海拔以及雪崩规模,并利用微信公众号或地方电视台实时向公众发布雪崩危险等级预报.经笔者现场调查,扎墨公路的24K嘎龙寺附近有较为舒缓的山间盆地,隧道修建以前的老公路可以到达海拔较高的山脊部位,人员易于攀登,是比较良好的雪层剖面观测场所,可以选为长期的雪崩试验场所,进行多种雪体试验(图4).足够多的不同坡度、坡向、海拔的雪体试验很容易发现某个时刻的雪体稳定性规律[123]. ...
The rheology of snow in large chute flows
1
2004
... 研究区域的选择在嘎隆拉隧道上方的沟槽,最高海拔4 569 m,最大雪崩形成区下缘海拔4 418 m.形成区坡度35.8°,包含三个潜在雪崩释放区.通过架设不同的传感器测量不同的雪崩参数(图5),其中:用高度20 m桅杆在不同高度架设压电开关、光电传感器测量雪崩流高度、密度和速度剖面[124-126].因为仪器测量为介入式观测,利用悬臂可以最大限度减少仪器对雪崩流的影响.此外还可以测量雪崩流冲击下承载体的形变[28],进一步还可以研究雪崩流与人工建筑之间的相互作用,如利用6.5 m的窄楔(narrow wedge)测量雪崩流的冲击力以及窄楔所受应力的9个分量[127],这些数据都是雪崩工程设计最基础的参数.数据采集系统设计中,冲击力、运动速度和雪崩流高度的取样频率一般应在2 000 Hz以上. ...
Experimental devices to determine snow avalanche basal friction and velocity profiles
0
2004
Density, velocity and friction measurements in a dry-snow avalanche
1
1998
... 研究区域的选择在嘎隆拉隧道上方的沟槽,最高海拔4 569 m,最大雪崩形成区下缘海拔4 418 m.形成区坡度35.8°,包含三个潜在雪崩释放区.通过架设不同的传感器测量不同的雪崩参数(图5),其中:用高度20 m桅杆在不同高度架设压电开关、光电传感器测量雪崩流高度、密度和速度剖面[124-126].因为仪器测量为介入式观测,利用悬臂可以最大限度减少仪器对雪崩流的影响.此外还可以测量雪崩流冲击下承载体的形变[28],进一步还可以研究雪崩流与人工建筑之间的相互作用,如利用6.5 m的窄楔(narrow wedge)测量雪崩流的冲击力以及窄楔所受应力的9个分量[127],这些数据都是雪崩工程设计最基础的参数.数据采集系统设计中,冲击力、运动速度和雪崩流高度的取样频率一般应在2 000 Hz以上. ...
Field experiments and numerical modeling of mass entrainment in snow avalanches
1
2006
... 研究区域的选择在嘎隆拉隧道上方的沟槽,最高海拔4 569 m,最大雪崩形成区下缘海拔4 418 m.形成区坡度35.8°,包含三个潜在雪崩释放区.通过架设不同的传感器测量不同的雪崩参数(图5),其中:用高度20 m桅杆在不同高度架设压电开关、光电传感器测量雪崩流高度、密度和速度剖面[124-126].因为仪器测量为介入式观测,利用悬臂可以最大限度减少仪器对雪崩流的影响.此外还可以测量雪崩流冲击下承载体的形变[28],进一步还可以研究雪崩流与人工建筑之间的相互作用,如利用6.5 m的窄楔(narrow wedge)测量雪崩流的冲击力以及窄楔所受应力的9个分量[127],这些数据都是雪崩工程设计最基础的参数.数据采集系统设计中,冲击力、运动速度和雪崩流高度的取样频率一般应在2 000 Hz以上. ...
Estimating extreme avalanche runout for the Columbia Mountains and Fernie area Rocky Mountains of British Columbia, Canada
1
2012
... 遥感观测方面,根据藏东南地形高差大、降雪量大以及多湿雪雪崩的特点,拟以RS-2U影像为主要监测传感器进行监测,并以哨兵-1号雷达影像、快鸟或高景-1光学影像进行结果的检验和验证.其具体操作步骤按Wesselink等[117]的方法执行.首先是数据前处理,包括各种影像数据的下载、投影坐标系的转换、2×2像素平滑消除斑纹、图像转换成GeoTIFF格式等.第二步,利用掩膜将<5°和>55°的不可能发生雪崩堆积的地形排除;5°和55°这两个阈值的选取符合雪崩的运动规律,McClung等[6,94]将雪崩形成区始发点和雪崩堆积区最远点的连线与水平线的夹角定义为α[94],他发现百年一遇的大雪崩α在15°~50°之间波动,在这个角度之外几乎很少有雪崩活动.根据Johnston等[128]和Delparte等[129]的统计,大多数雪崩的α值介于20°~40°之间.流通区平均坡度介于30°~15°之间,因为雪崩的动能未能全部耗散,冲击力较大,不会有较大粒径的砾石停留,也不会有树龄长的乔木生长.树龄较长的树木一般都出现在堆积区的远端,这些树木因为受到雪崩的冲击产生树木年轮的异常生长或者疤痕,从而成为历史大雪崩定年的证据[130].第三步,利用超宽带测绘带模式(S-1A extra-wide swath mode,S-1A EW)的哨兵-1A影像或者RADARSAT-2的超精细模式(RS-2 ultrafine mode)生成RGB图像.S-1A EW的特点是覆盖范围大、重访期短,其中红色和蓝色通道为无雪崩活动的参考图像,绿色通道为有雪崩图像,在合成图上,绿色一般为雪崩堆积.第四步,雪崩堆积的人工识别,雪崩堆积在雷达影像上一般呈绿色舌状,并向下延伸,在高分辨率的RS-2U图像上很容易辨识,通过对已发生雪崩堆积的判读,可以建立雪崩堆积后向散射的一组阈值,并制作阈值直方图.为了保证阈值的准确,在判读雪崩影像时一般由两名雪崩研究专业人员共同完成.滤波时阈值选取有固定阈值和动态阈值两种方式,Wesselink等[117]采用3 db、Karbou等[131]、Leinss等[91]采用4 db、Vicker等[106]采用6 db的固定值,发现参考影像为湿雪时分类结果不好.在参考影像为干雪时,雪崩暴发前的气象状况也会对雪崩堆积的分类产生影响[132].为了提高分类的准确性,Tompkin等[1]考虑了局地亮度对后向散射的影响,在计算后向散射时进行了局地分辨率权重的多视处理,采用了1.91 db的阈值进行分类,使得召回率和准确率都有了显著的提高.Eckerstorfer等[114]采用动态阈值,即后向散射μ+1.5SD和μ+2.5SD两种阈值,发现高阈值(2.5SD)的K均值聚类的分类效果更好.取值过高,有些雪崩堆积有可能没有被统计在内;取值过低,有些不是雪崩堆积的区域可能被统计进来.第五步,对无雪崩发生的参考图像和有雪崩发生的图像进行5×5像素中值滤波以消除斑纹.第六步,以雪崩活动的后向散射影像减去无雪崩活动的参考影像生成后向散射变化影像.第七步,生成雷达入射角度、顶底倒置以及雷达阴影等不可能发生雪崩的掩膜,以剔除部分地形影响.第八步,对监测影像使用各种掩膜及散射变化阈值,生成雪崩和无雪崩的二元像素分类.第九步,使用去除小斑块RSO滤波器(Remove Small Objects filter),根据影像分辨率,滤除确定雪崩堆积边界的不规则像元.第十步,采用自适应滤波将具有相同性质的像元连接起来,生成雪崩和无雪崩的二元影像图(图6). ...
Statistical runout modeling of snow avalanches using GIS in Glacier National Park, Canada
1
2008
... 遥感观测方面,根据藏东南地形高差大、降雪量大以及多湿雪雪崩的特点,拟以RS-2U影像为主要监测传感器进行监测,并以哨兵-1号雷达影像、快鸟或高景-1光学影像进行结果的检验和验证.其具体操作步骤按Wesselink等[117]的方法执行.首先是数据前处理,包括各种影像数据的下载、投影坐标系的转换、2×2像素平滑消除斑纹、图像转换成GeoTIFF格式等.第二步,利用掩膜将<5°和>55°的不可能发生雪崩堆积的地形排除;5°和55°这两个阈值的选取符合雪崩的运动规律,McClung等[6,94]将雪崩形成区始发点和雪崩堆积区最远点的连线与水平线的夹角定义为α[94],他发现百年一遇的大雪崩α在15°~50°之间波动,在这个角度之外几乎很少有雪崩活动.根据Johnston等[128]和Delparte等[129]的统计,大多数雪崩的α值介于20°~40°之间.流通区平均坡度介于30°~15°之间,因为雪崩的动能未能全部耗散,冲击力较大,不会有较大粒径的砾石停留,也不会有树龄长的乔木生长.树龄较长的树木一般都出现在堆积区的远端,这些树木因为受到雪崩的冲击产生树木年轮的异常生长或者疤痕,从而成为历史大雪崩定年的证据[130].第三步,利用超宽带测绘带模式(S-1A extra-wide swath mode,S-1A EW)的哨兵-1A影像或者RADARSAT-2的超精细模式(RS-2 ultrafine mode)生成RGB图像.S-1A EW的特点是覆盖范围大、重访期短,其中红色和蓝色通道为无雪崩活动的参考图像,绿色通道为有雪崩图像,在合成图上,绿色一般为雪崩堆积.第四步,雪崩堆积的人工识别,雪崩堆积在雷达影像上一般呈绿色舌状,并向下延伸,在高分辨率的RS-2U图像上很容易辨识,通过对已发生雪崩堆积的判读,可以建立雪崩堆积后向散射的一组阈值,并制作阈值直方图.为了保证阈值的准确,在判读雪崩影像时一般由两名雪崩研究专业人员共同完成.滤波时阈值选取有固定阈值和动态阈值两种方式,Wesselink等[117]采用3 db、Karbou等[131]、Leinss等[91]采用4 db、Vicker等[106]采用6 db的固定值,发现参考影像为湿雪时分类结果不好.在参考影像为干雪时,雪崩暴发前的气象状况也会对雪崩堆积的分类产生影响[132].为了提高分类的准确性,Tompkin等[1]考虑了局地亮度对后向散射的影响,在计算后向散射时进行了局地分辨率权重的多视处理,采用了1.91 db的阈值进行分类,使得召回率和准确率都有了显著的提高.Eckerstorfer等[114]采用动态阈值,即后向散射μ+1.5SD和μ+2.5SD两种阈值,发现高阈值(2.5SD)的K均值聚类的分类效果更好.取值过高,有些雪崩堆积有可能没有被统计在内;取值过低,有些不是雪崩堆积的区域可能被统计进来.第五步,对无雪崩发生的参考图像和有雪崩发生的图像进行5×5像素中值滤波以消除斑纹.第六步,以雪崩活动的后向散射影像减去无雪崩活动的参考影像生成后向散射变化影像.第七步,生成雷达入射角度、顶底倒置以及雷达阴影等不可能发生雪崩的掩膜,以剔除部分地形影响.第八步,对监测影像使用各种掩膜及散射变化阈值,生成雪崩和无雪崩的二元像素分类.第九步,使用去除小斑块RSO滤波器(Remove Small Objects filter),根据影像分辨率,滤除确定雪崩堆积边界的不规则像元.第十步,采用自适应滤波将具有相同性质的像元连接起来,生成雪崩和无雪崩的二元影像图(图6). ...
Climate drivers of large magnitude snow avalanche years in the U.S. northern Rocky Mountains
1
2021
... 遥感观测方面,根据藏东南地形高差大、降雪量大以及多湿雪雪崩的特点,拟以RS-2U影像为主要监测传感器进行监测,并以哨兵-1号雷达影像、快鸟或高景-1光学影像进行结果的检验和验证.其具体操作步骤按Wesselink等[117]的方法执行.首先是数据前处理,包括各种影像数据的下载、投影坐标系的转换、2×2像素平滑消除斑纹、图像转换成GeoTIFF格式等.第二步,利用掩膜将<5°和>55°的不可能发生雪崩堆积的地形排除;5°和55°这两个阈值的选取符合雪崩的运动规律,McClung等[6,94]将雪崩形成区始发点和雪崩堆积区最远点的连线与水平线的夹角定义为α[94],他发现百年一遇的大雪崩α在15°~50°之间波动,在这个角度之外几乎很少有雪崩活动.根据Johnston等[128]和Delparte等[129]的统计,大多数雪崩的α值介于20°~40°之间.流通区平均坡度介于30°~15°之间,因为雪崩的动能未能全部耗散,冲击力较大,不会有较大粒径的砾石停留,也不会有树龄长的乔木生长.树龄较长的树木一般都出现在堆积区的远端,这些树木因为受到雪崩的冲击产生树木年轮的异常生长或者疤痕,从而成为历史大雪崩定年的证据[130].第三步,利用超宽带测绘带模式(S-1A extra-wide swath mode,S-1A EW)的哨兵-1A影像或者RADARSAT-2的超精细模式(RS-2 ultrafine mode)生成RGB图像.S-1A EW的特点是覆盖范围大、重访期短,其中红色和蓝色通道为无雪崩活动的参考图像,绿色通道为有雪崩图像,在合成图上,绿色一般为雪崩堆积.第四步,雪崩堆积的人工识别,雪崩堆积在雷达影像上一般呈绿色舌状,并向下延伸,在高分辨率的RS-2U图像上很容易辨识,通过对已发生雪崩堆积的判读,可以建立雪崩堆积后向散射的一组阈值,并制作阈值直方图.为了保证阈值的准确,在判读雪崩影像时一般由两名雪崩研究专业人员共同完成.滤波时阈值选取有固定阈值和动态阈值两种方式,Wesselink等[117]采用3 db、Karbou等[131]、Leinss等[91]采用4 db、Vicker等[106]采用6 db的固定值,发现参考影像为湿雪时分类结果不好.在参考影像为干雪时,雪崩暴发前的气象状况也会对雪崩堆积的分类产生影响[132].为了提高分类的准确性,Tompkin等[1]考虑了局地亮度对后向散射的影响,在计算后向散射时进行了局地分辨率权重的多视处理,采用了1.91 db的阈值进行分类,使得召回率和准确率都有了显著的提高.Eckerstorfer等[114]采用动态阈值,即后向散射μ+1.5SD和μ+2.5SD两种阈值,发现高阈值(2.5SD)的K均值聚类的分类效果更好.取值过高,有些雪崩堆积有可能没有被统计在内;取值过低,有些不是雪崩堆积的区域可能被统计进来.第五步,对无雪崩发生的参考图像和有雪崩发生的图像进行5×5像素中值滤波以消除斑纹.第六步,以雪崩活动的后向散射影像减去无雪崩活动的参考影像生成后向散射变化影像.第七步,生成雷达入射角度、顶底倒置以及雷达阴影等不可能发生雪崩的掩膜,以剔除部分地形影响.第八步,对监测影像使用各种掩膜及散射变化阈值,生成雪崩和无雪崩的二元像素分类.第九步,使用去除小斑块RSO滤波器(Remove Small Objects filter),根据影像分辨率,滤除确定雪崩堆积边界的不规则像元.第十步,采用自适应滤波将具有相同性质的像元连接起来,生成雪崩和无雪崩的二元影像图(图6). ...
Monitoring avalanche debris in the French mountains using SAR observations from Sentinel-1 satellites
1
2018
... 遥感观测方面,根据藏东南地形高差大、降雪量大以及多湿雪雪崩的特点,拟以RS-2U影像为主要监测传感器进行监测,并以哨兵-1号雷达影像、快鸟或高景-1光学影像进行结果的检验和验证.其具体操作步骤按Wesselink等[117]的方法执行.首先是数据前处理,包括各种影像数据的下载、投影坐标系的转换、2×2像素平滑消除斑纹、图像转换成GeoTIFF格式等.第二步,利用掩膜将<5°和>55°的不可能发生雪崩堆积的地形排除;5°和55°这两个阈值的选取符合雪崩的运动规律,McClung等[6,94]将雪崩形成区始发点和雪崩堆积区最远点的连线与水平线的夹角定义为α[94],他发现百年一遇的大雪崩α在15°~50°之间波动,在这个角度之外几乎很少有雪崩活动.根据Johnston等[128]和Delparte等[129]的统计,大多数雪崩的α值介于20°~40°之间.流通区平均坡度介于30°~15°之间,因为雪崩的动能未能全部耗散,冲击力较大,不会有较大粒径的砾石停留,也不会有树龄长的乔木生长.树龄较长的树木一般都出现在堆积区的远端,这些树木因为受到雪崩的冲击产生树木年轮的异常生长或者疤痕,从而成为历史大雪崩定年的证据[130].第三步,利用超宽带测绘带模式(S-1A extra-wide swath mode,S-1A EW)的哨兵-1A影像或者RADARSAT-2的超精细模式(RS-2 ultrafine mode)生成RGB图像.S-1A EW的特点是覆盖范围大、重访期短,其中红色和蓝色通道为无雪崩活动的参考图像,绿色通道为有雪崩图像,在合成图上,绿色一般为雪崩堆积.第四步,雪崩堆积的人工识别,雪崩堆积在雷达影像上一般呈绿色舌状,并向下延伸,在高分辨率的RS-2U图像上很容易辨识,通过对已发生雪崩堆积的判读,可以建立雪崩堆积后向散射的一组阈值,并制作阈值直方图.为了保证阈值的准确,在判读雪崩影像时一般由两名雪崩研究专业人员共同完成.滤波时阈值选取有固定阈值和动态阈值两种方式,Wesselink等[117]采用3 db、Karbou等[131]、Leinss等[91]采用4 db、Vicker等[106]采用6 db的固定值,发现参考影像为湿雪时分类结果不好.在参考影像为干雪时,雪崩暴发前的气象状况也会对雪崩堆积的分类产生影响[132].为了提高分类的准确性,Tompkin等[1]考虑了局地亮度对后向散射的影响,在计算后向散射时进行了局地分辨率权重的多视处理,采用了1.91 db的阈值进行分类,使得召回率和准确率都有了显著的提高.Eckerstorfer等[114]采用动态阈值,即后向散射μ+1.5SD和μ+2.5SD两种阈值,发现高阈值(2.5SD)的K均值聚类的分类效果更好.取值过高,有些雪崩堆积有可能没有被统计在内;取值过低,有些不是雪崩堆积的区域可能被统计进来.第五步,对无雪崩发生的参考图像和有雪崩发生的图像进行5×5像素中值滤波以消除斑纹.第六步,以雪崩活动的后向散射影像减去无雪崩活动的参考影像生成后向散射变化影像.第七步,生成雷达入射角度、顶底倒置以及雷达阴影等不可能发生雪崩的掩膜,以剔除部分地形影响.第八步,对监测影像使用各种掩膜及散射变化阈值,生成雪崩和无雪崩的二元像素分类.第九步,使用去除小斑块RSO滤波器(Remove Small Objects filter),根据影像分辨率,滤除确定雪崩堆积边界的不规则像元.第十步,采用自适应滤波将具有相同性质的像元连接起来,生成雪崩和无雪崩的二元影像图(图6). ...
Performance of manual and automatic detection of dry snow avalanches in Sentinel-1 SAR images
1
2022
... 遥感观测方面,根据藏东南地形高差大、降雪量大以及多湿雪雪崩的特点,拟以RS-2U影像为主要监测传感器进行监测,并以哨兵-1号雷达影像、快鸟或高景-1光学影像进行结果的检验和验证.其具体操作步骤按Wesselink等[117]的方法执行.首先是数据前处理,包括各种影像数据的下载、投影坐标系的转换、2×2像素平滑消除斑纹、图像转换成GeoTIFF格式等.第二步,利用掩膜将<5°和>55°的不可能发生雪崩堆积的地形排除;5°和55°这两个阈值的选取符合雪崩的运动规律,McClung等[6,94]将雪崩形成区始发点和雪崩堆积区最远点的连线与水平线的夹角定义为α[94],他发现百年一遇的大雪崩α在15°~50°之间波动,在这个角度之外几乎很少有雪崩活动.根据Johnston等[128]和Delparte等[129]的统计,大多数雪崩的α值介于20°~40°之间.流通区平均坡度介于30°~15°之间,因为雪崩的动能未能全部耗散,冲击力较大,不会有较大粒径的砾石停留,也不会有树龄长的乔木生长.树龄较长的树木一般都出现在堆积区的远端,这些树木因为受到雪崩的冲击产生树木年轮的异常生长或者疤痕,从而成为历史大雪崩定年的证据[130].第三步,利用超宽带测绘带模式(S-1A extra-wide swath mode,S-1A EW)的哨兵-1A影像或者RADARSAT-2的超精细模式(RS-2 ultrafine mode)生成RGB图像.S-1A EW的特点是覆盖范围大、重访期短,其中红色和蓝色通道为无雪崩活动的参考图像,绿色通道为有雪崩图像,在合成图上,绿色一般为雪崩堆积.第四步,雪崩堆积的人工识别,雪崩堆积在雷达影像上一般呈绿色舌状,并向下延伸,在高分辨率的RS-2U图像上很容易辨识,通过对已发生雪崩堆积的判读,可以建立雪崩堆积后向散射的一组阈值,并制作阈值直方图.为了保证阈值的准确,在判读雪崩影像时一般由两名雪崩研究专业人员共同完成.滤波时阈值选取有固定阈值和动态阈值两种方式,Wesselink等[117]采用3 db、Karbou等[131]、Leinss等[91]采用4 db、Vicker等[106]采用6 db的固定值,发现参考影像为湿雪时分类结果不好.在参考影像为干雪时,雪崩暴发前的气象状况也会对雪崩堆积的分类产生影响[132].为了提高分类的准确性,Tompkin等[1]考虑了局地亮度对后向散射的影响,在计算后向散射时进行了局地分辨率权重的多视处理,采用了1.91 db的阈值进行分类,使得召回率和准确率都有了显著的提高.Eckerstorfer等[114]采用动态阈值,即后向散射μ+1.5SD和μ+2.5SD两种阈值,发现高阈值(2.5SD)的K均值聚类的分类效果更好.取值过高,有些雪崩堆积有可能没有被统计在内;取值过低,有些不是雪崩堆积的区域可能被统计进来.第五步,对无雪崩发生的参考图像和有雪崩发生的图像进行5×5像素中值滤波以消除斑纹.第六步,以雪崩活动的后向散射影像减去无雪崩活动的参考影像生成后向散射变化影像.第七步,生成雷达入射角度、顶底倒置以及雷达阴影等不可能发生雪崩的掩膜,以剔除部分地形影响.第八步,对监测影像使用各种掩膜及散射变化阈值,生成雪崩和无雪崩的二元像素分类.第九步,使用去除小斑块RSO滤波器(Remove Small Objects filter),根据影像分辨率,滤除确定雪崩堆积边界的不规则像元.第十步,采用自适应滤波将具有相同性质的像元连接起来,生成雪崩和无雪崩的二元影像图(图6). ...





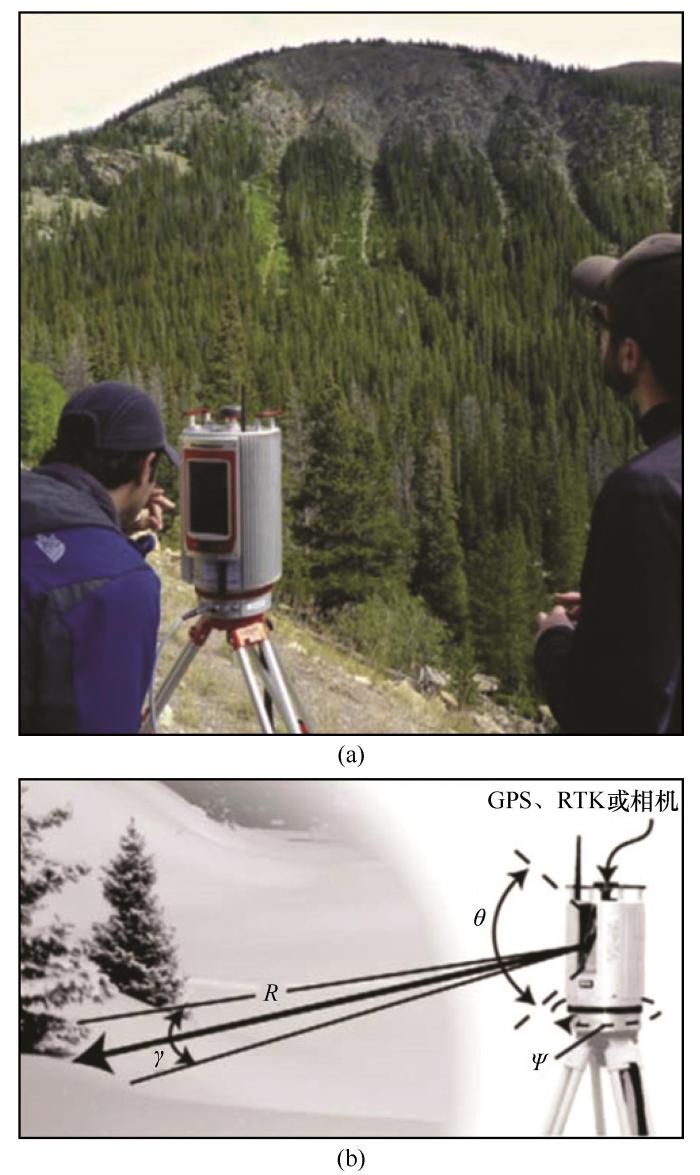
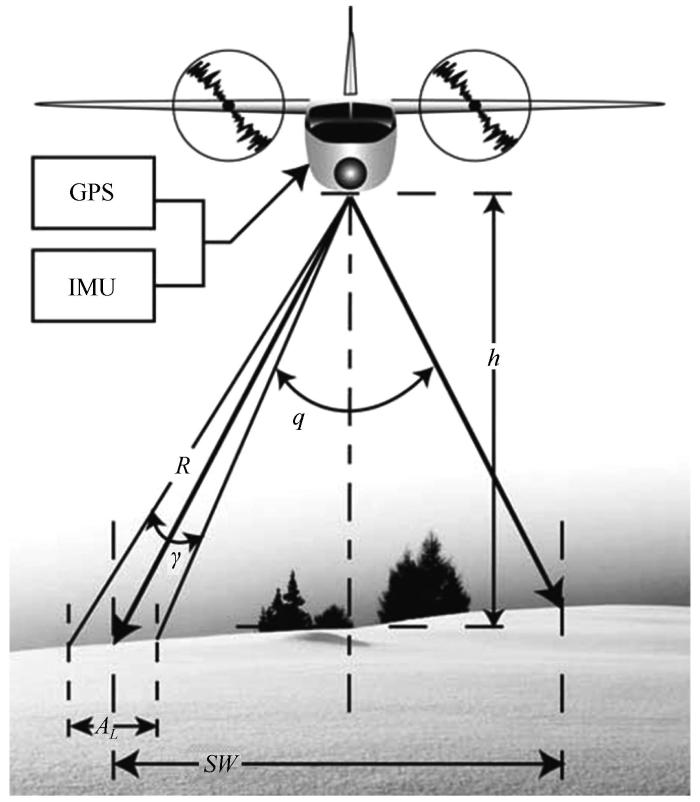
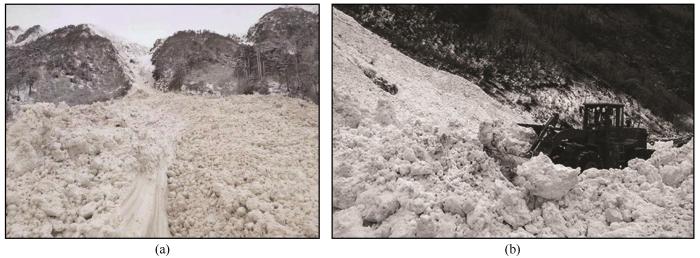
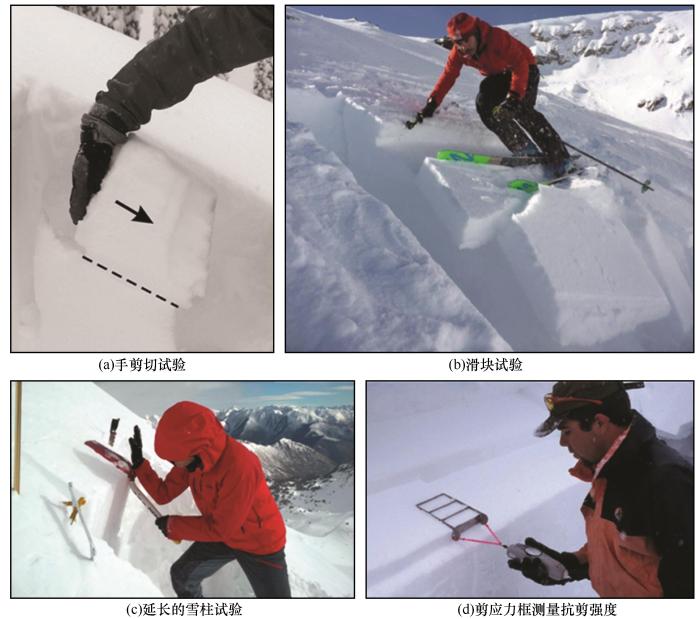
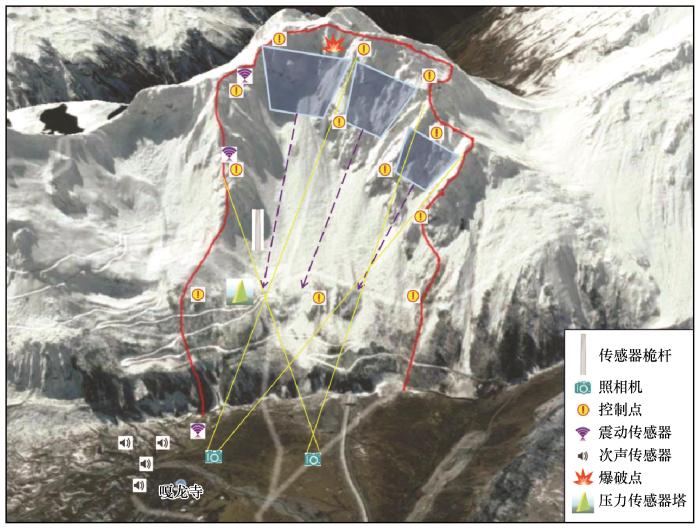
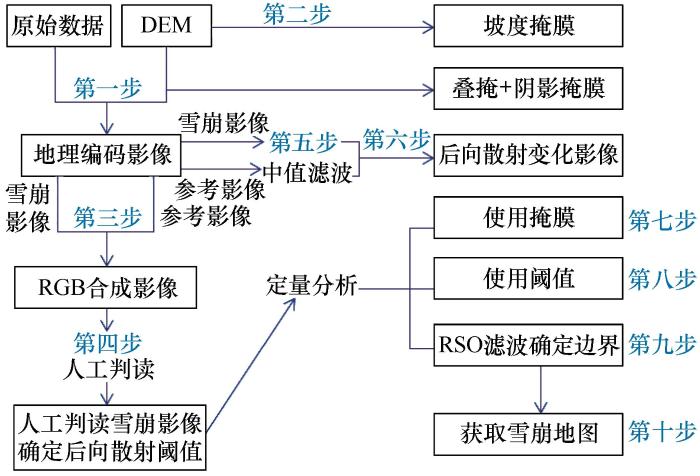

 甘公网安备 62010202000676号
甘公网安备 62010202000676号
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}